기술기고문
ToF 시스템을 사용한 거리 측정과 물체 감지
글: 토마스 브랜드(Thomas Brand) 시니어 FAE / 아나로그디바이스(Analog Devices, Inc.)
거리 측정과 물체 감지는 공장 자동화, 로보틱스, 물류 등 다양한 애플리케이션에서 중요한 역할을 한다. 특히 안전과 관련한 경우, 특정 거리에서 물체나 사람을 감지하고 대응하는 것이 필요할 수 있다. 예를 들면 작업자가 위험 구역 안에 들어갔을 때 로봇 팔을 즉시 멈춰야 하는 경우가 그렇다.
이러한 용도로 ToF(time of flight) 기술이 점점 더 많이 사용되고 있다. ToF 기술은 레이저 같은 변조 광원을 사용해서 빛을 쏜 후, 이 빛이 1개 또는 그 이상의 물체에 부딪혀서 되돌아오는 것을 센서나 카메라로 포착한다. 빛이 방출된 시점과 반사된 빛이 수신되는 시점 사이의 시간 차이 ?t를 알면 거리를 계산할 수 있다. 이 시간 지연은 카메라와 물체 사이의 거리의 두 배(왕복 거리)에 해당한다. 그러므로 깊이 d = (c x ?t)/2의 공식으로 거리 계산이 가능하다. 여기서 c는 빛의 속도이다. ToF 카메라는 필요한 깊이 정보와 함께 2D 데이터를 출력한다.
ToF는 전체 이미지를 한 번에 포착할 수 있다. 한 줄씩 스캔하거나, 센서와 대상 물체 간 상대적인 움직임이 필요치 않다. ToF를 흔히 라이다(light detection and ranging, LiDAR)로 분류하는데, 정확히는 스캐닝 라이다가 아니라 플래시 라이다 기반 기법이다.
ToF를 사용해서 광 펄스의 비행 시간을 측정하기 위해서는 기본적으로 두 가지 방법을 사용할 수 있다. CCD(charge coupled device) 기술에 기반한 펄스 동작과 CW(continuous wave) 동작이다.
펄스 모드는 광 펄스를 방출하고 수신한 시점 사이에 경과한 시간을 측정하는 데 반해, CW 모드는 방출된 변조 광 펄스와 수신된 변조 광 펄스 사이의 위상 편이를 계산한다. 두 방법 모두 나름의 장단점이 있다. 펄스 모드는 주변 빛에 대한 강건성이 좀더 우수해 실외 애플리케이션용으로 좀더 적합하다. 이 기술은 광원에 에너지가 높고 짧은 펄스로 방출하게 되는 반면 CW 모드는 구현하기가 좀더 쉽다. 광원이 극히 짧을 필요가 없고 상승/하강 에지가 빠르기 때문이다. 하지만 높은 정밀도가 요구될 때는 고주파 변조 신호가 필요할 수 있고 그러면 구현하기 어려울 수 있다.
기존의 픽셀 크기로는 높은 칩 분해능이 가능해, 단지 거리 측정뿐 아니라 물체와 동작까지 인식할 수 있다. 측정 거리는 수 센티미터(10센티미터 미만)에서부터 수 미터(15미터 미만)까지 가능하다.
하지만 모든 물체를 동일한 수준으로 감지할 수 있는 것은 아니다. 물체의 상태, 반사도, 속도 등에 따라 측정 결과가 달라질 수 있다.
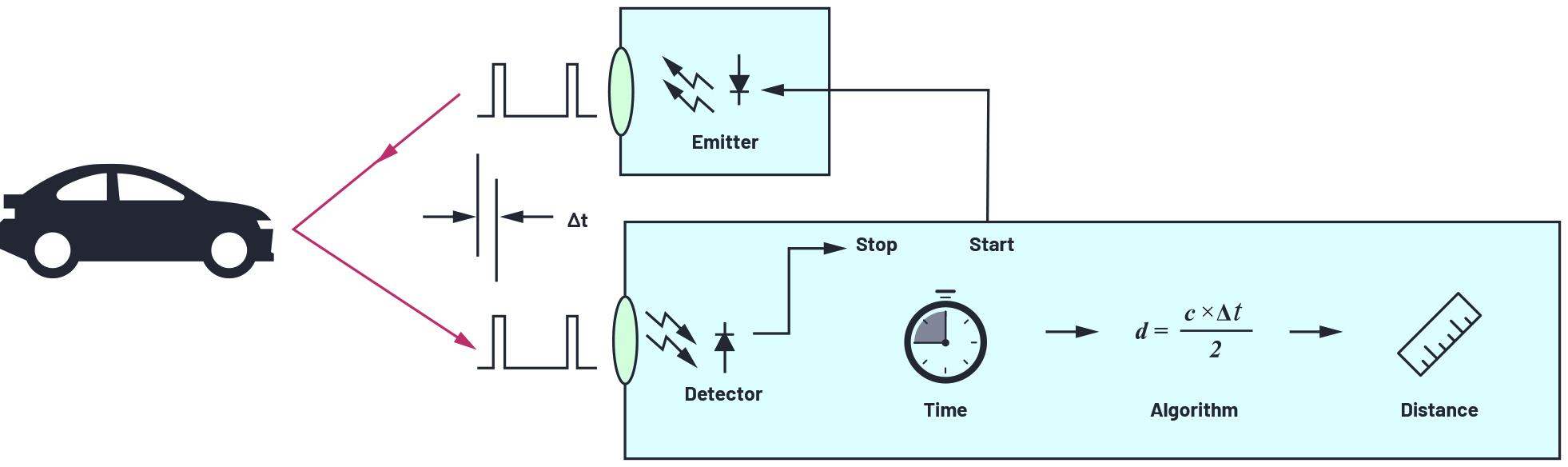
그림 1: ToF 측정 원리
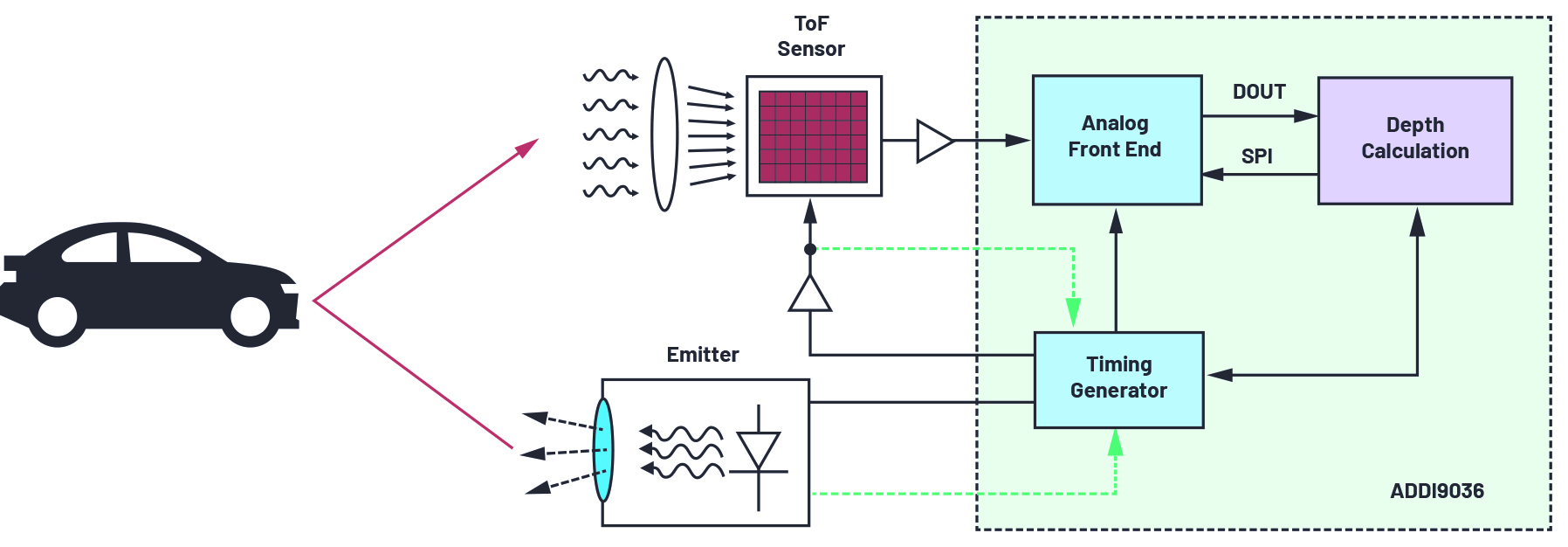
그림 2: ToF 시스템 블록 다이어그램
안개나 강한 햇빛 같은 환경 요인에 의해서도 측정 결과가 왜곡될 수 있다. 강한 햇빛은 주변광 억제 기능을 사용해서 완화할 수 있다.
고성능 반도체 전문기업 아나로그디바이스(Analog Devices, Inc., ADI)는 사용자가 3D ToF 솔루션을 신속하게 구현할 수 있도록 포괄적인 3D ToF 솔루션을 제공한다. 이들 솔루션은 데이터 처리, 레이저 드라이버, 전원 관리, 소프트웨어/펌웨어를 단일 유닛에 통합하고 있다. 따라서 별도의 추가 부품으로는 주파수 변조 광학 신호를 방출하기 위한 이미터와 반사 신호를 검출하기 위한 검출기만 요구된다. 그림 2는 이 블록 다이어그램을 보여준다.
깊이 계산 기능을 통합하고 있는 아날로그 프론트 엔드(AFE)를 사용하면 이러한 시스템을 손쉽게 개발할 수 있다. ADDI9036이 바로 그러한 제품이다. 이는 레이저 다이오드 드라이버, 12비트 ADC, 고정밀 클럭 발생기(CCD와 레이저를 위한 타이밍 발생)를 통합한 포괄적인 CCD ToF 신호 프로세서이다. ADDI9036은 VGA CCD 센서로부터의 원시 이미지 데이터를 처리해서 깊이/픽셀 데이터를 생성한다.
또한 ADI는 통합적인 모듈이나 개발 플랫폼을 제공하기 위해서 설계 파트너사들과 협력하고 있다. 사용자는 이러한 평가 시스템을 이용해 자신만의 특정한 알고리즘을 개발할 수 있으며, 이들 모듈과 플랫폼을 사용함으로써 개발 시간을 단축할 수도 있다. 이 점은 특히 빠르게 개발해야 하는 압박을 받는 산업용이나 자동차 같은 분야에 유용하다.
저자 소개
토마스 브랜드(Thomas Brand)는 2015년에 석사 논문을 쓰면서 아나로그디바이스(Analog Devices)와 인연을 맺었다. 졸업 후 아나로그디바이스에서 수습 기간을 마치고, 2017년에 필드 애플리케이션 엔지니어(FAE)가 되었다. 현재는 중부 유럽의 주요 산업용 고객들을 지원하는 업무를 맡고 있으며, 산업용 이더넷을 전문 분야로 하고 있다. 모스바흐 산학협력 대학에서 전기공학을 전공했으며, 콘스탄츠 응용과학 대학에서 국제 무역 석사학위를 취득했다. 문의: thomas.brand@analog.com
거리 측정과 물체 감지는 공장 자동화, 로보틱스, 물류 등 다양한 애플리케이션에서 중요한 역할을 한다. 특히 안전과 관련한 경우, 특정 거리에서 물체나 사람을 감지하고 대응하는 것이 필요할 수 있다. 예를 들면 작업자가 위험 구역 안에 들어갔을 때 로봇 팔을 즉시 멈춰야 하는 경우가 그렇다.
이러한 용도로 ToF(time of flight) 기술이 점점 더 많이 사용되고 있다. ToF 기술은 레이저 같은 변조 광원을 사용해서 빛을 쏜 후, 이 빛이 1개 또는 그 이상의 물체에 부딪혀서 되돌아오는 것을 센서나 카메라로 포착한다. 빛이 방출된 시점과 반사된 빛이 수신되는 시점 사이의 시간 차이 ?t를 알면 거리를 계산할 수 있다. 이 시간 지연은 카메라와 물체 사이의 거리의 두 배(왕복 거리)에 해당한다. 그러므로 깊이 d = (c x ?t)/2의 공식으로 거리 계산이 가능하다. 여기서 c는 빛의 속도이다. ToF 카메라는 필요한 깊이 정보와 함께 2D 데이터를 출력한다.
ToF는 전체 이미지를 한 번에 포착할 수 있다. 한 줄씩 스캔하거나, 센서와 대상 물체 간 상대적인 움직임이 필요치 않다. ToF를 흔히 라이다(light detection and ranging, LiDAR)로 분류하는데, 정확히는 스캐닝 라이다가 아니라 플래시 라이다 기반 기법이다.
ToF를 사용해서 광 펄스의 비행 시간을 측정하기 위해서는 기본적으로 두 가지 방법을 사용할 수 있다. CCD(charge coupled device) 기술에 기반한 펄스 동작과 CW(continuous wave) 동작이다.
펄스 모드는 광 펄스를 방출하고 수신한 시점 사이에 경과한 시간을 측정하는 데 반해, CW 모드는 방출된 변조 광 펄스와 수신된 변조 광 펄스 사이의 위상 편이를 계산한다. 두 방법 모두 나름의 장단점이 있다. 펄스 모드는 주변 빛에 대한 강건성이 좀더 우수해 실외 애플리케이션용으로 좀더 적합하다. 이 기술은 광원에 에너지가 높고 짧은 펄스로 방출하게 되는 반면 CW 모드는 구현하기가 좀더 쉽다. 광원이 극히 짧을 필요가 없고 상승/하강 에지가 빠르기 때문이다. 하지만 높은 정밀도가 요구될 때는 고주파 변조 신호가 필요할 수 있고 그러면 구현하기 어려울 수 있다.
기존의 픽셀 크기로는 높은 칩 분해능이 가능해, 단지 거리 측정뿐 아니라 물체와 동작까지 인식할 수 있다. 측정 거리는 수 센티미터(10센티미터 미만)에서부터 수 미터(15미터 미만)까지 가능하다.
하지만 모든 물체를 동일한 수준으로 감지할 수 있는 것은 아니다. 물체의 상태, 반사도, 속도 등에 따라 측정 결과가 달라질 수 있다.
그림 1: ToF 측정 원리
그림 2: ToF 시스템 블록 다이어그램
안개나 강한 햇빛 같은 환경 요인에 의해서도 측정 결과가 왜곡될 수 있다. 강한 햇빛은 주변광 억제 기능을 사용해서 완화할 수 있다.
고성능 반도체 전문기업 아나로그디바이스(Analog Devices, Inc., ADI)는 사용자가 3D ToF 솔루션을 신속하게 구현할 수 있도록 포괄적인 3D ToF 솔루션을 제공한다. 이들 솔루션은 데이터 처리, 레이저 드라이버, 전원 관리, 소프트웨어/펌웨어를 단일 유닛에 통합하고 있다. 따라서 별도의 추가 부품으로는 주파수 변조 광학 신호를 방출하기 위한 이미터와 반사 신호를 검출하기 위한 검출기만 요구된다. 그림 2는 이 블록 다이어그램을 보여준다.
깊이 계산 기능을 통합하고 있는 아날로그 프론트 엔드(AFE)를 사용하면 이러한 시스템을 손쉽게 개발할 수 있다. ADDI9036이 바로 그러한 제품이다. 이는 레이저 다이오드 드라이버, 12비트 ADC, 고정밀 클럭 발생기(CCD와 레이저를 위한 타이밍 발생)를 통합한 포괄적인 CCD ToF 신호 프로세서이다. ADDI9036은 VGA CCD 센서로부터의 원시 이미지 데이터를 처리해서 깊이/픽셀 데이터를 생성한다.
또한 ADI는 통합적인 모듈이나 개발 플랫폼을 제공하기 위해서 설계 파트너사들과 협력하고 있다. 사용자는 이러한 평가 시스템을 이용해 자신만의 특정한 알고리즘을 개발할 수 있으며, 이들 모듈과 플랫폼을 사용함으로써 개발 시간을 단축할 수도 있다. 이 점은 특히 빠르게 개발해야 하는 압박을 받는 산업용이나 자동차 같은 분야에 유용하다.
저자 소개
토마스 브랜드(Thomas Brand)는 2015년에 석사 논문을 쓰면서 아나로그디바이스(Analog Devices)와 인연을 맺었다. 졸업 후 아나로그디바이스에서 수습 기간을 마치고, 2017년에 필드 애플리케이션 엔지니어(FAE)가 되었다. 현재는 중부 유럽의 주요 산업용 고객들을 지원하는 업무를 맡고 있으며, 산업용 이더넷을 전문 분야로 하고 있다. 모스바흐 산학협력 대학에서 전기공학을 전공했으며, 콘스탄츠 응용과학 대학에서 국제 무역 석사학위를 취득했다. 문의: thomas.brand@analog.com
제품스펙