기술기고문
다축 로봇 및 공작기계 애플리케이션의 타이밍 과제
머리말
산업용 로봇과 공작기계 애플리케이션은 주어진 작업을 수행하려면 여러 개의 축들이 공간적으로 정밀하고도 조화롭게 움직여야 한다. 로봇은 통상 6개의 축을 일사불란하게 제어하는데, 로봇이 레일을 따라서 움직이는 경우에는 7개의 축을 사용하기도 한다. CNC 기계류의 경우에는 5개 축이 일반적이며, 장비와 작업물이 공간 상에서 서로에 대해 둘 다 움직일 때는 최대 12개 축을 사용할 때도 있다. 각각의 축은 서보 드라이브와 모터로 이루어지며, 모터와 축 조인트 또는 엔드 이펙터 사이에 기어박스를 사용할 수도 있다. 그런 다음 이 시스템을 산업용 이더넷 네트워크를 통해서 그림 1에서 보는 것과 같은 라인 토폴로지로 연결한다. 머신 컨트롤러는 각각의 서보 축을 위해 필요한 공간적 궤적을 개별적인 위치 레퍼런스로 변환하고, 이것을 네트워크를 통해 주기적 간격으로 전달한다.
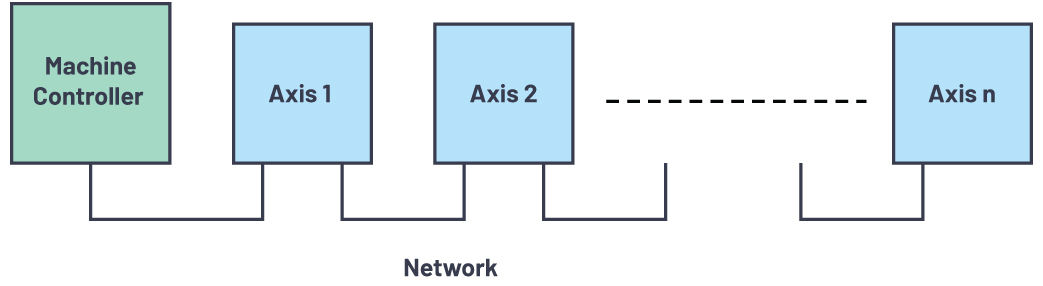
그림 1: 다축 머신의 네트워크 토폴로지
제어 사이클
이러한 애플리케이션은 정해진 사이클 간격으로 작동하며, 이 사이클 시간은 서보모터 드라이브의 기본 제어/PWM 스위칭 사이클과 동일하거나 또는 배수이다. 이러한 맥락에서는 그림 2에서 보듯이 엔드투엔드 네트워크 전송 지연이 중요한 파라미터이다. 매 사이클 마다, 그림 1에서 볼 수 있는 머신 컨트롤러에서 각각의 노드로 새로운 위치 레퍼런스와 그 밖에 다른 정보를 전송해야 한다. 이때 각각의 노드에서 새로운 위치 레퍼런스와 새로운 센서 데이터를 사용해서 서보 제어 알고리즘 계산을 업데이트하기 위해서 PWM 사이클에 충분한 시간이 남아 있어야 한다. 각각의 노드는 업데이트된 PWM 벡터를 서보 드라이브에 시간적으로 동일한 시점에 적용하는데, 여기에는 산업용 이더넷 프로토콜에 기반한 분산형 클럭 메커니즘이 활용된다. 제어 아키텍처에 따라서는 제어 루프 알고리즘의 일부를 PLC로 구현할 수 있으며, 관련된 센서 정보 업데이트를 네트워크를 통해 수신하는 데에는 충분한 시간을 사용할 수 있어야 한다.
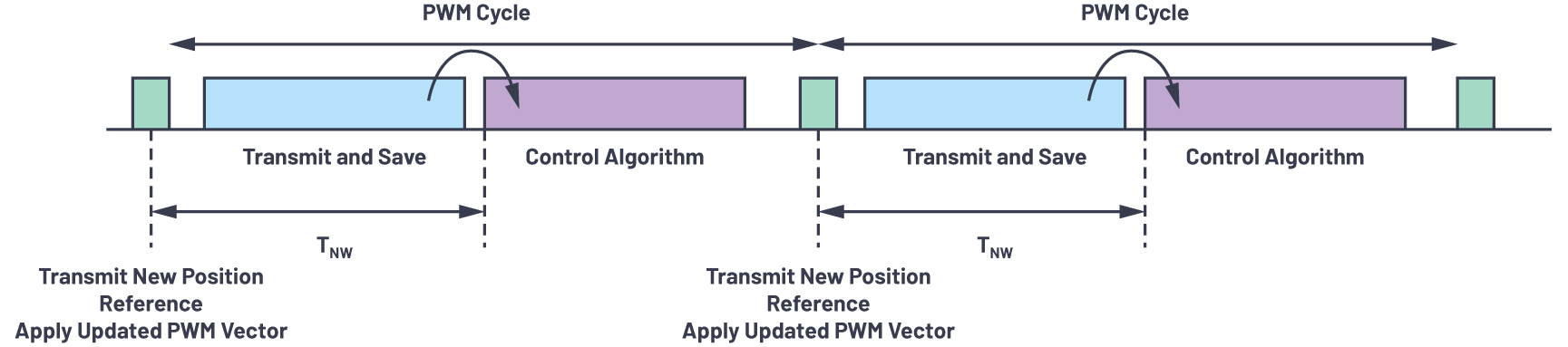
그림 2: PWM 사이클과 네트워크 전송 시간
데이터 전송 지연
네트워크 상의 트래픽이 오직 머신 컨트롤러와 서보 노드들 사이에 흐르는 순환적 데이터뿐이라고 가정하면, 네트워크 지연 시간(TNW)은 가장 먼 노드까지의 네트워크 호핑 수, 네트워크 데이터 레이트, 그리고 각각의 노드에서 발생하는 지연 시간에 의해 결정된다. 로봇이나 공작기계 같은 경우에는 와이어를 통한 신호 전달 지연이 무시할 만한 수준이다. 케이블 길이가 매우 짧기 때문이다. 주된 지연 요인은 대역폭 지연인데, 이는 와이어를 통해 데이터를 전송하는 데 필요한 시간이다. 그림 3에서는 최소 크기 이더넷 프레임(통상적인 공작기계와 로봇 제어일 때)의 경우, 100Mbps와 1Gbps 비트 레이트에 대한 대역폭 지연 시간을 보여준다. 이는 패킷의 크기를 단순히 데이터 레이트로 나눈 것이다. 컨트롤러에서 서보까지 이어지는 다축 시스템에 대한 통상적인 데이터 페이로드는 각각의 서보에 4byte의 속도/위치 레퍼런스 업데이트와 1byte의 제어 워드 업데이트로 이루어진다. 이는 6축 로봇일 경우 30byte 페이로드라는 것을 뜻한다. 물론 애플리케이션에 따라서 업데이트에 더 많은 정보를 전달하고 더 많은 축을 사용할 수도 있다. 이러한 경우에는 최소 크기보다 더 큰 패킷을 사용해야 할 것이다.
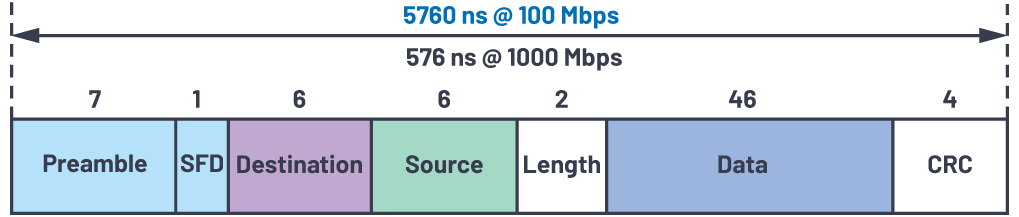
그림 3: 최소 길이 이더넷 프레임의 대역폭 지연
대역폭 지연 외에도, 이더넷 프레임이 각각의 서보 네트워크 인터페이스에서 PHY와 2포트 스위치를 통과하면서 다른 지연 요인들이 발생한다. 그림 4와 그림 5은 이러한 지연 요인들을 보여준다. 그림을 보면 프레임은 PHY를 거쳐서 MAC을 지나서(1→2 경로) 도착지 어드레스 분석 기능으로 전달된다. 여기서는 프레임의 프리앰블과 도착지 부분만 전달된다. 2→3a 경로에서는 현재 노드에 해당하는 페이로드 데이터를 추출하고, 2→3b 경로에서는 프레임을 도착지 노드들로 계속해서 전달한다. 그림 4a에서는 2→3a 경로로 페이로드만 전달하는데, 그림 4b에서는 프레임을 전부 전달한다. 다만 이더넷 프로토콜마다 약간씩 차이가 있을 수 있다. 3b→4 경로로는 프레임이 전송 큐를 거쳐서 PHY를 지나고 다시 와이어로 전송된다. 그림에 보이는 것처럼, 라인 종단부 노드 상에는 이 경로가 존재하지 않는다. 이 예시에서는 저장-전달(store-and-forward) 방식이 아니라 컷스루(cut-through) 패킷 스위칭 방식 적용을 가정했다. 저장-전달 방식은 전달에 앞서서 전체적인 프레임을 스위치로 저장하므로 지연 시간이 훨씬 더 길어진다.
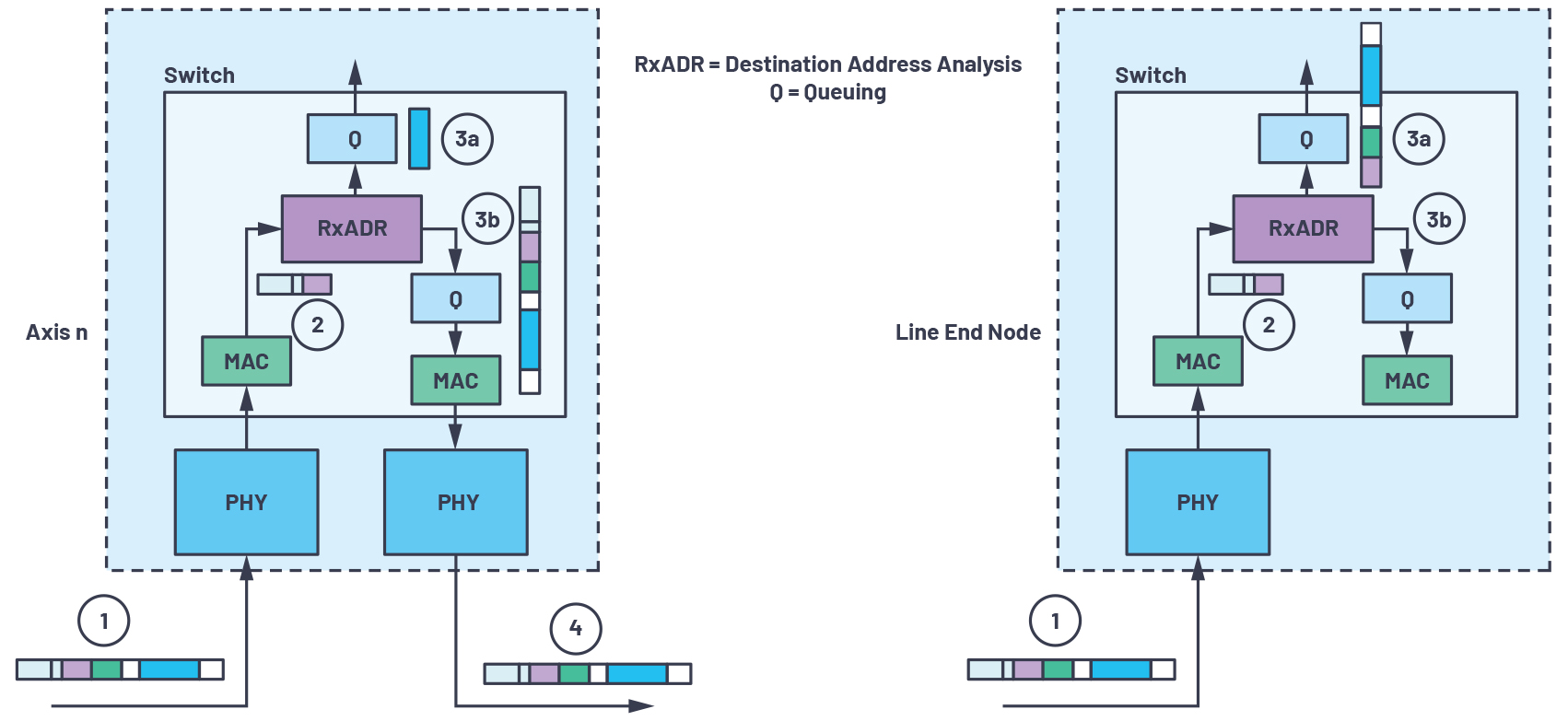
그림 4: 프레임 지연 시간. (a) 2포트 노드 프레임 지연 시간, (b) 라인 종단부 노드
그림 5는 시간에 따른 프레임의 지연 요인들을 나타낸 것으로, 한 개의 축 노드를 통과할 때의 총 프레임 전송 시간을 알 수 있다. TBW는 대역폭 지연이고, TL_1node는 한 개 노드를 통과할 때의 프레임 지연이다. 비트들을 와이어를 통해 물리적으로 전송하고 도착지 어드레스 분석 기능으로 어드레스 비트를 전달하는 데 따른 지연 외에, PHY 및 스위치 지연 시간 역시 시스템의 전송 지연에 영향을 미치는 또 다른 요인들이다. 와이어 상에서 비트 레이트가 높아지고 노드 수가 증가할수록 전체적인 엔드투엔드 프레임 전송 지연에 있어서 이들 지연 시간의 중요성은 더욱 커진다.
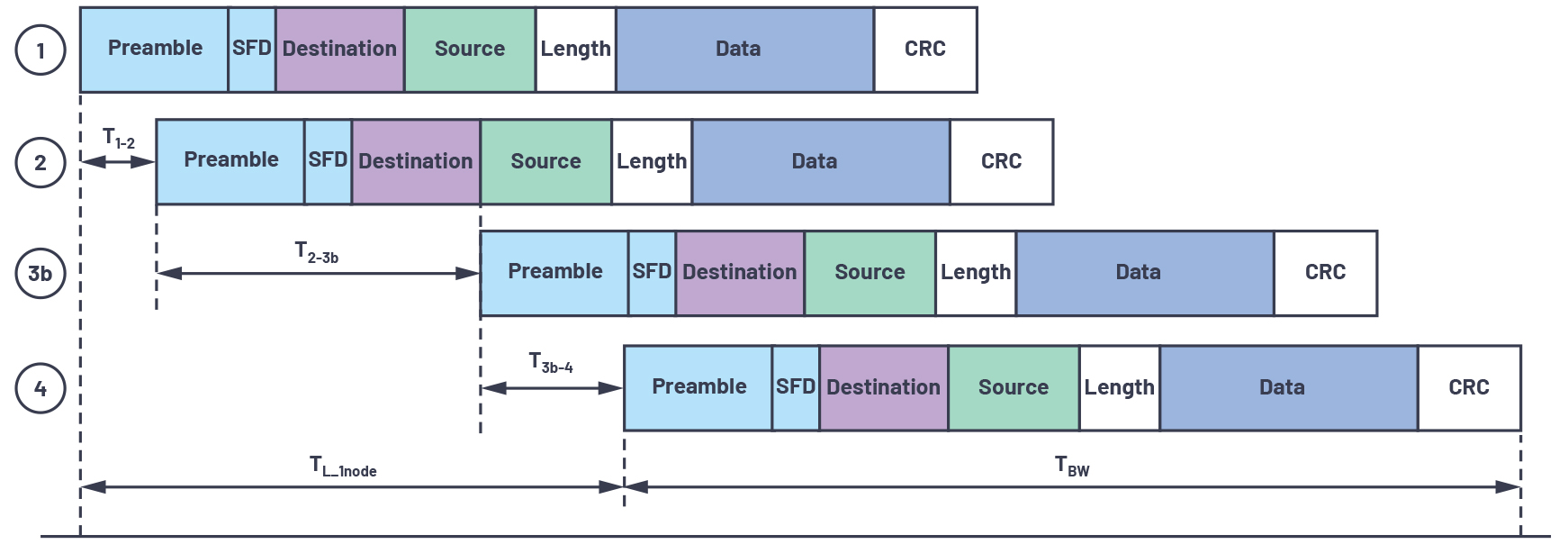
그림 5: 프레임 전송 타임라인
저-지연 솔루션
아나로그디바이스(Analog Devices)는 열악한 산업용 환경에서 최대 105ºC까지 확장된 주변 온도 범위에 대해 신뢰성 높게 동작하고 전력 및 지연 시간 규격이 업계에서 가장 우수한 2개의 새로운 산업용 이더넷 PHY 제품을 출시했다. ADIN1300과 ADIN1200은 앞서 열거한 바로 그러한 문제들을 해결하도록 설계되었으며, 산업용 애플리케이션용으로 적합하다. 여기에 fido5000 실시간 이더넷 다중 프로토콜 임베디드 2포트 스위치를 결합함으로써 확정적 시간 민감형 애플리케이션을 위한 포괄적인 솔루션을 제공한다.
표 1은 수신 버퍼 분석이 도착지 어드레스 기반이고 100Mbps 네트워크인 경우, PHY와 스위치로 인한 지연 시간을 보여준다.
산업용 로봇과 공작기계 애플리케이션은 주어진 작업을 수행하려면 여러 개의 축들이 공간적으로 정밀하고도 조화롭게 움직여야 한다. 로봇은 통상 6개의 축을 일사불란하게 제어하는데, 로봇이 레일을 따라서 움직이는 경우에는 7개의 축을 사용하기도 한다. CNC 기계류의 경우에는 5개 축이 일반적이며, 장비와 작업물이 공간 상에서 서로에 대해 둘 다 움직일 때는 최대 12개 축을 사용할 때도 있다. 각각의 축은 서보 드라이브와 모터로 이루어지며, 모터와 축 조인트 또는 엔드 이펙터 사이에 기어박스를 사용할 수도 있다. 그런 다음 이 시스템을 산업용 이더넷 네트워크를 통해서 그림 1에서 보는 것과 같은 라인 토폴로지로 연결한다. 머신 컨트롤러는 각각의 서보 축을 위해 필요한 공간적 궤적을 개별적인 위치 레퍼런스로 변환하고, 이것을 네트워크를 통해 주기적 간격으로 전달한다.
그림 1: 다축 머신의 네트워크 토폴로지
제어 사이클
이러한 애플리케이션은 정해진 사이클 간격으로 작동하며, 이 사이클 시간은 서보모터 드라이브의 기본 제어/PWM 스위칭 사이클과 동일하거나 또는 배수이다. 이러한 맥락에서는 그림 2에서 보듯이 엔드투엔드 네트워크 전송 지연이 중요한 파라미터이다. 매 사이클 마다, 그림 1에서 볼 수 있는 머신 컨트롤러에서 각각의 노드로 새로운 위치 레퍼런스와 그 밖에 다른 정보를 전송해야 한다. 이때 각각의 노드에서 새로운 위치 레퍼런스와 새로운 센서 데이터를 사용해서 서보 제어 알고리즘 계산을 업데이트하기 위해서 PWM 사이클에 충분한 시간이 남아 있어야 한다. 각각의 노드는 업데이트된 PWM 벡터를 서보 드라이브에 시간적으로 동일한 시점에 적용하는데, 여기에는 산업용 이더넷 프로토콜에 기반한 분산형 클럭 메커니즘이 활용된다. 제어 아키텍처에 따라서는 제어 루프 알고리즘의 일부를 PLC로 구현할 수 있으며, 관련된 센서 정보 업데이트를 네트워크를 통해 수신하는 데에는 충분한 시간을 사용할 수 있어야 한다.
그림 2: PWM 사이클과 네트워크 전송 시간
데이터 전송 지연
네트워크 상의 트래픽이 오직 머신 컨트롤러와 서보 노드들 사이에 흐르는 순환적 데이터뿐이라고 가정하면, 네트워크 지연 시간(TNW)은 가장 먼 노드까지의 네트워크 호핑 수, 네트워크 데이터 레이트, 그리고 각각의 노드에서 발생하는 지연 시간에 의해 결정된다. 로봇이나 공작기계 같은 경우에는 와이어를 통한 신호 전달 지연이 무시할 만한 수준이다. 케이블 길이가 매우 짧기 때문이다. 주된 지연 요인은 대역폭 지연인데, 이는 와이어를 통해 데이터를 전송하는 데 필요한 시간이다. 그림 3에서는 최소 크기 이더넷 프레임(통상적인 공작기계와 로봇 제어일 때)의 경우, 100Mbps와 1Gbps 비트 레이트에 대한 대역폭 지연 시간을 보여준다. 이는 패킷의 크기를 단순히 데이터 레이트로 나눈 것이다. 컨트롤러에서 서보까지 이어지는 다축 시스템에 대한 통상적인 데이터 페이로드는 각각의 서보에 4byte의 속도/위치 레퍼런스 업데이트와 1byte의 제어 워드 업데이트로 이루어진다. 이는 6축 로봇일 경우 30byte 페이로드라는 것을 뜻한다. 물론 애플리케이션에 따라서 업데이트에 더 많은 정보를 전달하고 더 많은 축을 사용할 수도 있다. 이러한 경우에는 최소 크기보다 더 큰 패킷을 사용해야 할 것이다.
그림 3: 최소 길이 이더넷 프레임의 대역폭 지연
대역폭 지연 외에도, 이더넷 프레임이 각각의 서보 네트워크 인터페이스에서 PHY와 2포트 스위치를 통과하면서 다른 지연 요인들이 발생한다. 그림 4와 그림 5은 이러한 지연 요인들을 보여준다. 그림을 보면 프레임은 PHY를 거쳐서 MAC을 지나서(1→2 경로) 도착지 어드레스 분석 기능으로 전달된다. 여기서는 프레임의 프리앰블과 도착지 부분만 전달된다. 2→3a 경로에서는 현재 노드에 해당하는 페이로드 데이터를 추출하고, 2→3b 경로에서는 프레임을 도착지 노드들로 계속해서 전달한다. 그림 4a에서는 2→3a 경로로 페이로드만 전달하는데, 그림 4b에서는 프레임을 전부 전달한다. 다만 이더넷 프로토콜마다 약간씩 차이가 있을 수 있다. 3b→4 경로로는 프레임이 전송 큐를 거쳐서 PHY를 지나고 다시 와이어로 전송된다. 그림에 보이는 것처럼, 라인 종단부 노드 상에는 이 경로가 존재하지 않는다. 이 예시에서는 저장-전달(store-and-forward) 방식이 아니라 컷스루(cut-through) 패킷 스위칭 방식 적용을 가정했다. 저장-전달 방식은 전달에 앞서서 전체적인 프레임을 스위치로 저장하므로 지연 시간이 훨씬 더 길어진다.
그림 4: 프레임 지연 시간. (a) 2포트 노드 프레임 지연 시간, (b) 라인 종단부 노드
그림 5는 시간에 따른 프레임의 지연 요인들을 나타낸 것으로, 한 개의 축 노드를 통과할 때의 총 프레임 전송 시간을 알 수 있다. TBW는 대역폭 지연이고, TL_1node는 한 개 노드를 통과할 때의 프레임 지연이다. 비트들을 와이어를 통해 물리적으로 전송하고 도착지 어드레스 분석 기능으로 어드레스 비트를 전달하는 데 따른 지연 외에, PHY 및 스위치 지연 시간 역시 시스템의 전송 지연에 영향을 미치는 또 다른 요인들이다. 와이어 상에서 비트 레이트가 높아지고 노드 수가 증가할수록 전체적인 엔드투엔드 프레임 전송 지연에 있어서 이들 지연 시간의 중요성은 더욱 커진다.
그림 5: 프레임 전송 타임라인
저-지연 솔루션
아나로그디바이스(Analog Devices)는 열악한 산업용 환경에서 최대 105ºC까지 확장된 주변 온도 범위에 대해 신뢰성 높게 동작하고 전력 및 지연 시간 규격이 업계에서 가장 우수한 2개의 새로운 산업용 이더넷 PHY 제품을 출시했다. ADIN1300과 ADIN1200은 앞서 열거한 바로 그러한 문제들을 해결하도록 설계되었으며, 산업용 애플리케이션용으로 적합하다. 여기에 fido5000 실시간 이더넷 다중 프로토콜 임베디드 2포트 스위치를 결합함으로써 확정적 시간 민감형 애플리케이션을 위한 포괄적인 솔루션을 제공한다.
표 1은 수신 버퍼 분석이 도착지 어드레스 기반이고 100Mbps 네트워크인 경우, PHY와 스위치로 인한 지연 시간을 보여준다.
표 1: PHY와 스위치로 인한 지연 시간
| 지연 요인 | 부품 | 시간 |
| PHY 수신 | ADIN1200 | 248ns |
| PHY 전송 | ADIN1200 | 52ns |
| 스위치 프리앰블과 도착지 | fido5000 | 1120ns (100Mbps로 14byte) |
| 스위치 MAC, 큐잉, 리시버 | fido5000 | 330ns |
일례로, 7축 라인 네트워크에 이들 지연을 취합하고 최종 노드에 전체 페이로드의 클러킹을 더하면(그림 4에서 3a) 총 전송 지연 시간은 다음과 같다:

이 계산에서 58 x 80ns는 프리앰블과 도착지 어드레스 바이트를 읽은 후에 남은 58byte 페이로드이다.
이 계산은 네트워크에 다른 어떤 트래픽이 없거나 또는 시간 민감형 트래픽에 우선적으로 액세스할 때라고 가정한 것이다. 사용되는 산업용 이더넷 프로토콜에 따라서 이 계산은 약간씩 차이가 있을 수 있다. 그림 2로 되돌아가서, 머신 시스템에서 사이클 시간이 최저 50 ~ 100µs인 경우, 가장 멀리 있는 노드까지의 프레임 전송이 이 사이클의 거의 50%까지 차지할 수 있다. 그러면 모터 제어와 모션 제어 알고리즘 계산을 업데이트하기 위해서 사용할 수 있는 시간은 짧아진다. 성능 극대화를 위해서는 이 전송 시간을 최소화하는 것이 중요하다. 그럼으로써 더 길고 더 복잡한 제어 계산을 할 수 있다. 와이어에서 데이터와 관련한 지연은 고정되어 있고 비트 레이트와 관련되므로, 성능 극대화를 위해서는 ADIN1200 PHY와 fido5000 임베디드 스위치 같이 지연 시간이 낮은 부품을 사용하는 것이 중요하다. 특히 노드 수가 늘어나고(가령 12축 CNC 머신 같은 경우) 사이클 시간이 짧아질 때는 더욱 그렇다. 기가비트 이더넷으로 옮겨가면 대역폭 지연의 영향을 크게 줄일 수는 있지만, 스위치와 PHY 부품으로 인해 유발되는 지연 시간 비중은 높아진다. 예컨대 기가비트 네트워크에서 12축 CNC 머신은 네트워크 전송 지연이 대략 7.5µs이다. 대역폭 지연은 무시할 만한 수준이며, 이더넷 프레임 크기를 최소를 사용하든 최대를 사용하든 큰 차이가 없다. 네트워크 지연은 PHY와 스위치 간에 거의 균등하게 나뉜다. 그러므로 산업용 시스템이 기가비트 속도로 옮겨가고, 제어 사이클 시간은 짧아지고(EtherCAT®은 12.5µs 사이클 시간 달성), 노드 수가 늘어남에 따라서(제어 네트워크에 이더넷 연결 센서 추가, 네트워크 토폴로지 평탄화 등) 이들 부품들에서 지연 시간을 최소화하는 것이 매우 중요해졌다.
맺음말
고성능 다축 동기 모션 애플리케이션에서 정밀하고 확정적인 제어 타이밍이 요구되고, 제어 사이클 시간은 짧아지고, 제어 알고리즘은 복잡해짐에 따라서 엔드투엔드 지연 시간을 최소화하는 것이 중요해졌다. 이러한 시스템에서 성능을 극대화하기 위해서는 지연 시간이 낮은 PHY와 임베디드 컷스루 스위치를 사용해야 한다. 바로 이러한 요구를 충족하도록 아나로그디바이스는 2개의 견고한 산업용 이더넷 PHY 제품으인 ADIN1300(10Gb/100Gb/1000Gb)과 ADIN1200(10Gb/100Gb)을 출시했다. 이들 제품에 관한 추가 정보는 analog.com/ADIN1300과 analog.com/ADIN1200에서 확인할 수 있다. 또한 analog.com/chronous에서는 ADI의 Chronous™ 산업용 이더넷 솔루션 포트폴리오에 대해, 그리고 이들 제품이 어떻게 산업용 이더넷 네트워크를 가속화하는지에 대해서 확인할 수 있다.
# # #
저자 소개
다라 오설리번(Dara O’Sullivan)은 아나로그디바이스(Analog Devices) 자동화 및 에너지 사업부 커넥티드 모션 및 로보틱스 팀의 시스템 애플리케이션 매니저이다. 산업용 모션 제어 애플리케이션의 전력 변환, 제어, 모니터링과 관련해서 풍부한 경험을 쌓고 있다. 아일랜드의 코크 대학에서 공학 학사, 석사, 박사학위를 취득했으며, 2001년부터 연구소, 컨설팅 회사, 기업에서 산업용 및 재생 에너지 애플리케이션과 관련한 업무를 담당해왔다. 문의: dara.osullivan@analog.com
제품스펙