기술기고문
라이다 기술을 적용한 물체 감지 및 분류 자율 시스템 설계 구현의 이점
글: 사르벤 이펙(Sarven Ipek) 마케팅 매니저, 론 카푸스타(Ron Kapusta) 펠로우 / 아나로그 디바이스(Analog Devices, Inc.)
라이다 시스템을 설계할 때에는 해당 시스템으로 얼마나 작은 물체를 감지하고자 하는지, 물체의 반사도는 어느 정도인지, 물체들이 얼마나 멀리 떨어져 있는지 판단해야 한다. 여기에 따라서 시스템의 각 분해능을 결정할 수 있고, 이로부터 달성 가능한 최소 신호대 잡음비(SNR)를 계산할 수 있다. 이것이 물체를 감지하기 위한 탐지 능력을 좌우한다.
감지해야 할 주변 환경을 이해하고 절충적인 설계 요구사항들을 잘 조화시킴으로써 비용과 성능 면에서 최적화된 솔루션을 달성할 수 있다. 예를 들어 도로 상에서 시속 100킬로미터로 주행하는 자율 주행차와 창고에서 사람들과 함께 섞여서 시속 6킬로미터로 움직이는 자율 로봇을 비교해 보자. 자율 주행차의 경우에는 차가 시속 100킬로미터로 움직인다는 점 외에, 반대 방향으로 다른 차들 역시 동일한 속도로 주행하고 있다는 점을 고려해야 한다. 주변 감지 차원에서 보면, 이것은 어떤 물체가 시속 200킬로미터의 상대 속도로 접근하고 있다는 것을 뜻한다. 만약 최대 200미터 거리에서 물체를 감지하는 라이다 센서라고 하면, 단 1초만에 차 간 간격이 25% 가까워지는 것이다. 자동차의 속도(혹은 어떤 물체로의 비선형적 접근 속도), 제동 거리, 회피 동작의 역학이 상황마다 다 다를 수 있다. 대체로 고속 애플리케이션에는 원거리 라이다 시스템이 필요하다.
라이다 시스템의 또 다른 중요한 설계 고려사항은 분해능이다. 각 분해능(angular resolution)이 세밀하면 라이다 시스템이 단일 물체에 대해서 다중의 픽셀로 리턴 신호를 수신할 수 있다. 그림 1에서 보듯이, 각 분해능이 1°면 200미터 거리에서 픽셀의 한 면이 3.5미터에 이른다. 픽셀이 이 크기이면 감지하고자 하는 많은 물체들보다 더 크므로 몇 가지 복잡한 과제들이 생긴다. 우선, 흔히 공간적 애버리징을 사용해서 SNR과 감지 능력을 향상시킬 수 있는데, 물체 하나당 한 픽셀이면 이렇게 하기가 어려워진다. 또한 물체를 감지한다 하더라도 물체의 크기를 예측할 수 없다. 도로 상의 장애물, 동물, 교통 표지판, 모터사이클 같은 것들은 모두 크기가 3.5미터 이하이다. 이에 비해 각 분해능이 0.1°인 시스템은 픽셀 크기가 10배 더 작으므로 200미터 거리에서 평균적인 폭의 자동차를 대략 5개의 인접한 리턴 신호로 측정할 수 있다. 대부분의 자동차는 높이보다 폭이 더 길다. 그러므로 이 시스템은 자동차와 모터사이클을 구분할 수 있다.
어떤 물체를 안전하게 넘어갈 수 있을지 판단하려면 방위각보다 고도각에서 훨씬 더 세밀한 분해능을 필요로 한다. 예를 들어서 자율 로봇 청소기가 천천히 움직이면서 탁자 다리 같이 좁고 긴 물체를 감지하기 위해서는 설계 요구가 달라져야 한다.
거리, 움직이는 속도, 물체의 특성, 그에 따른 성능 요구를 이해한 다음에는 라이다 시스템 아키텍처를 결정할 수 있다. 스캐닝을 할 것인지 플래시를 사용할 것인지, 혹은 다이렉트 ToF(time of flight)를 사용할 것인지 파형 디지털화를 할 것인지를 비롯해서 많은 선택들을 해야 한다. 아나로그디바이스(Analog Devices)의 포괄적인 고성능 신호 체인 및 전력관리 부품들(그림 2에서 파란색으로 표시)은 다양한 아키텍처로 폼 팩터와 비용을 비롯한 다양한 요구를 충족하는 시스템 설계가 가능하도록 필요한 모든 기능 블록을 제공한다.
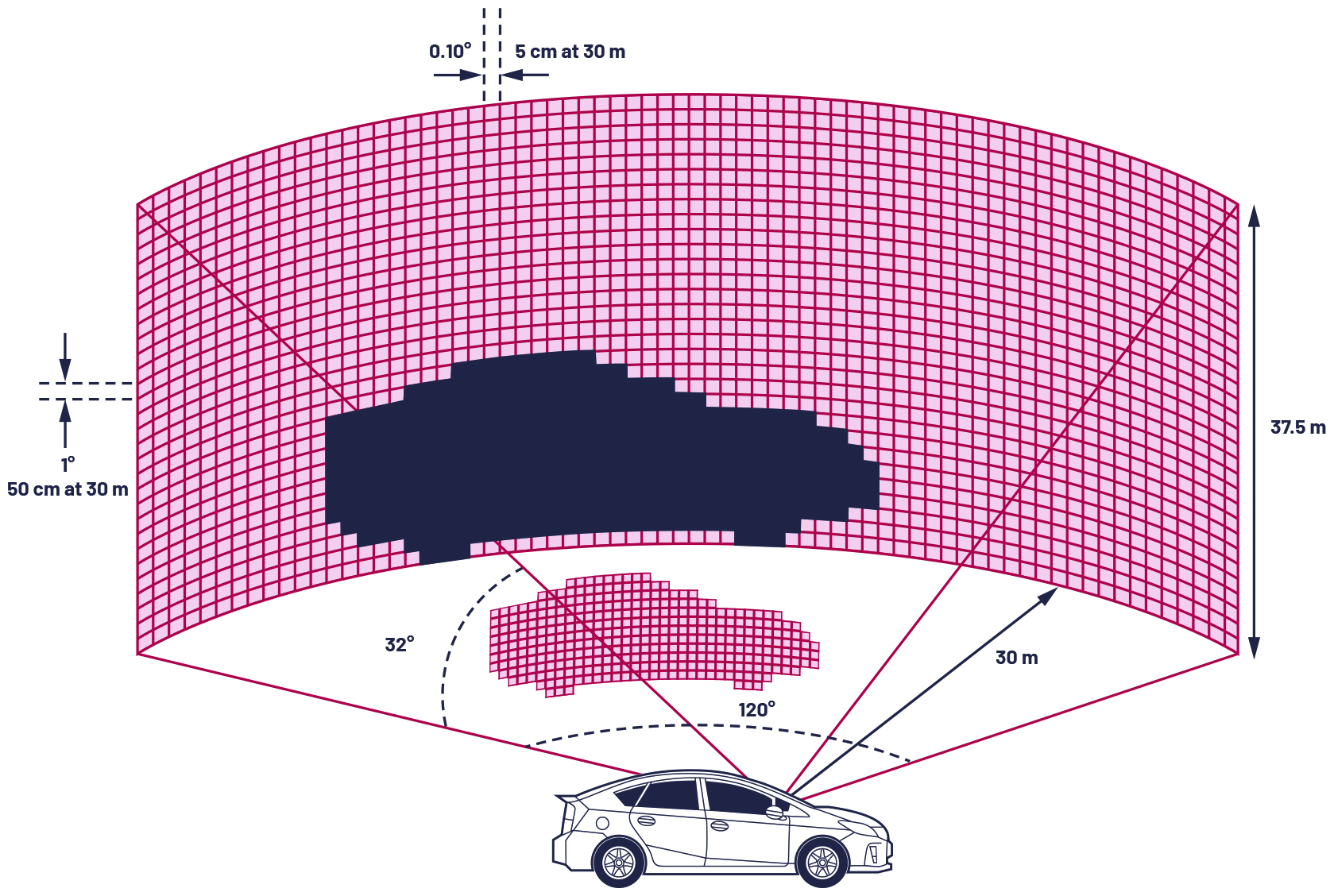
그림 1: 32개 수직 채널을 사용하는 라이다 시스템이 1°의 각 분해능으로 주변 환경을 수평으로 스캔
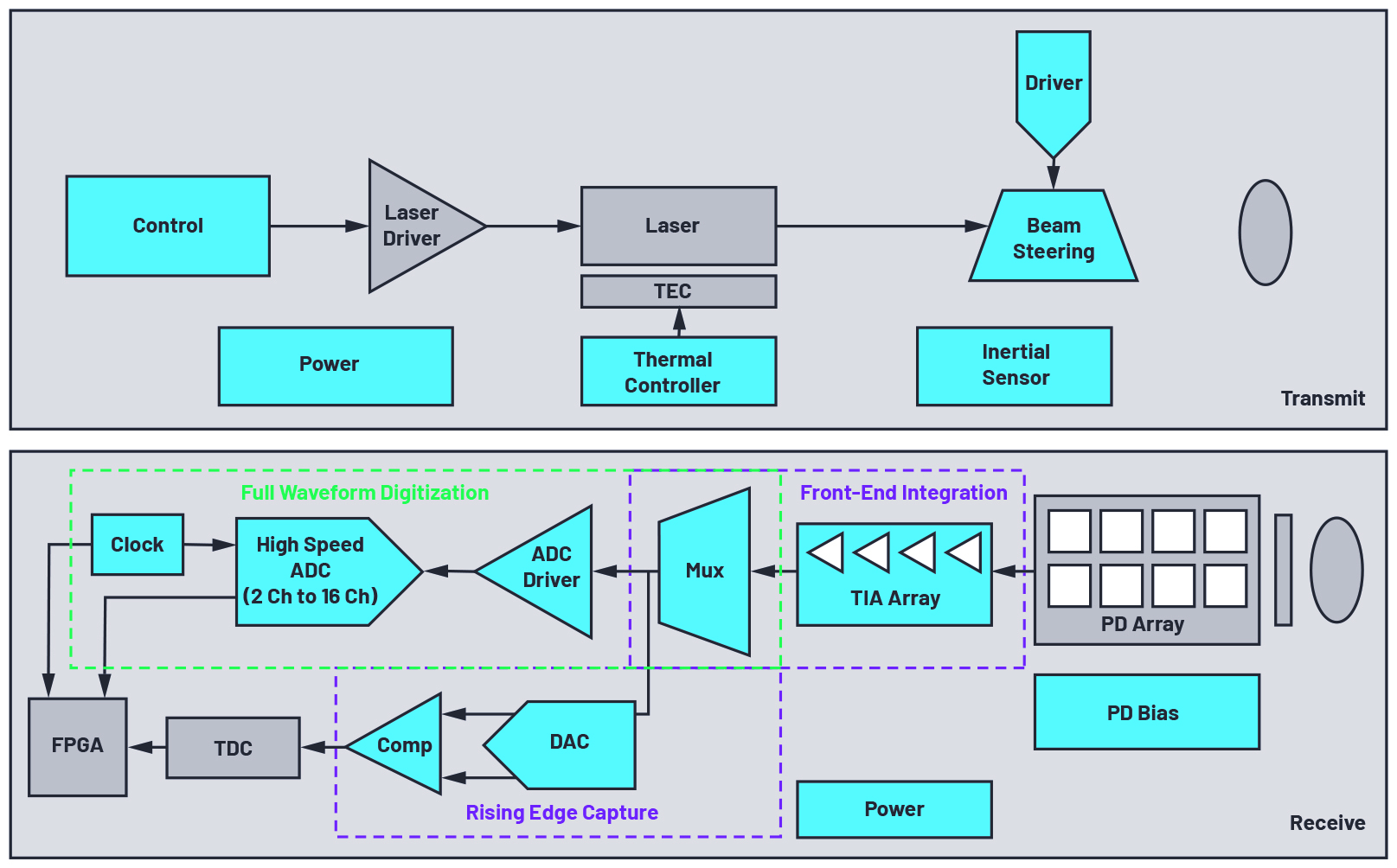
그림 2: 라이다 시스템을 구성하는 부품들
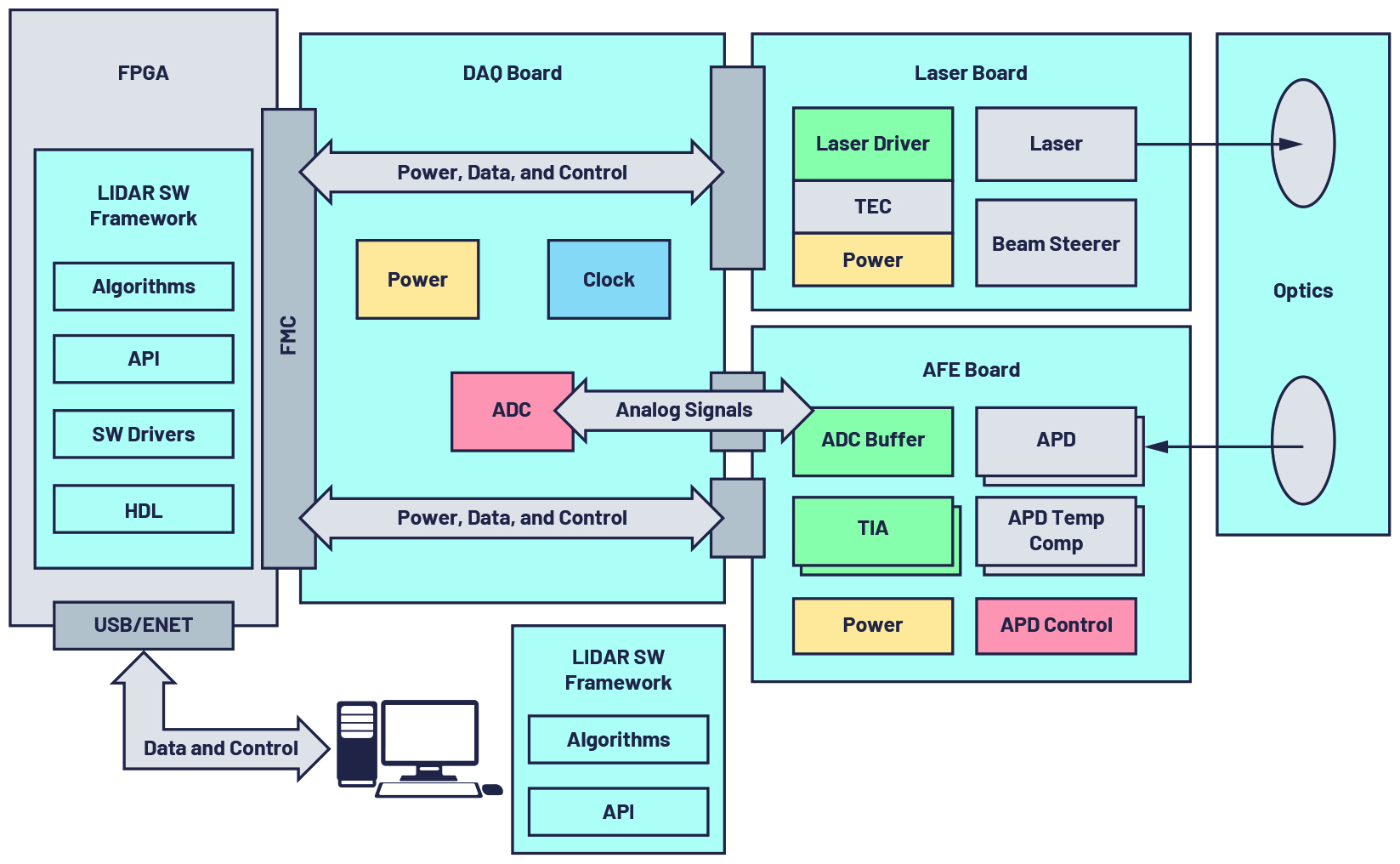
그림 3: 아나로그디바ㅣ스의 AD-FMCLIDAR1-EBZ 라이다 개발 솔루션 시스템 아키텍처
ADI의 AD-FMCLIDAR1-EBZ는 고성능 라이다 프로토타이핑 플랫폼으로서 905nm 펄스형 다이렉트 ToF 라이다 개발 키트이다. 이 시스템을 사용해서 1D 정적 플래시 구성으로 ADAS/AV는 물론이고 로롯, 드론, 농업 및 건설 장비용 프로토타입을 빠르게 개발할 수 있다. 이 레퍼런스 디자인에 사용된 부품들은 원거리 펄스형 라이다 애플리케이션에 적합하도록 선택된 것들이다. 이 시스템은 905nm 레이저 소스를 ADP3634 고속 듀얼 4A MOSFET을 사용해서 구동한다. 퍼스트 센서(First Sensor)의 16채널 APD 어레이를 LT8331 프로그래머블 전원공급장치로 구동해서 APD 전원 전압을 공급한다. 낮은 잡음과 높은 대역폭이 특징인 여러 개의 4채널 LTC6561 TIA와 435mW/채널로 채널당 전력 소모가 극히 낮은 AD9094 1GSPS 8비트 ADC를 사용하고 있다. 대역폭과 샘플링 레이트는 앞으로 계속해서 높여가야 할 것이다. 그럼으로써 전반적으로 더 높은 시스템 프레임 레이트와 향상된 거리 정밀도를 지원할 수 있다. 전력 소모를 최소화하는 것도 중요하다. 발열을 낮추면 열/기계적 설계를 간소화하고 폼 팩터를 줄일 수 있기 때문이다.
거리 혹은 깊이 정밀도는 ADC 샘플 레이트(sample rate)와 연관된다. 거리 정밀도란 시스템이 물체까지의 거리를 정확하게 측정할 수 있는 능력을 일컫는 데, 주차장이나 물류 창고처럼 좁은 영역 안에서 움직이는 경우에 중요하다. 시간에 따른 거리 변화로 속도를 계산할 수도 있는데, 이러한 경우에는 더더욱 우수한 거리 정밀도가 요구된다. 다이렉트 ToF 같이 단순한 임계 알고리즘을 사용하는 경우에는 달성 가능한 거리 정밀도가 1ns 샘플 간격으로 15센티미터, 즉 1GSPS ADC의 성능에 해당한다. 이것은 c(dt/2)로 계산할 수 있다. 여기서 c는 빛의 속도이고 dt는 ADC 샘플 간격이다. ADC를 사용하기 때문에 내삽(interpolation) 같은 좀더 정교한 기법을 사용해서 거리 정밀도를 향상시킬 수 있다. 대략적으로 SNR의 제곱근으로 거리 정밀도를 향상시킬 수 있다. 데이터 처리를 위해서 가장 성능이 우수한 방법은 매칭된 필터를 사용해서 SNR을 극대화하고 그 다음에 내삽을 사용해서 우수한 거리 정밀도를 달성하는 것이다.
라이다 시스템 설계를 돕기 위한 또 다른 툴인 EVAL-ADAL6110-16은 구성 가능성이 뛰어난 평가 시스템이다. 이 시스템은 충돌 회피, 고도 모니터링, 연착륙 같이 실시간 (65Hz) 물체 감지/추적을 필요로 하는 애플리케이션용으로 단순하면서 구성 가능성이 뛰어난 2D 플래시 라이다 깊이 센서를 제공한다.
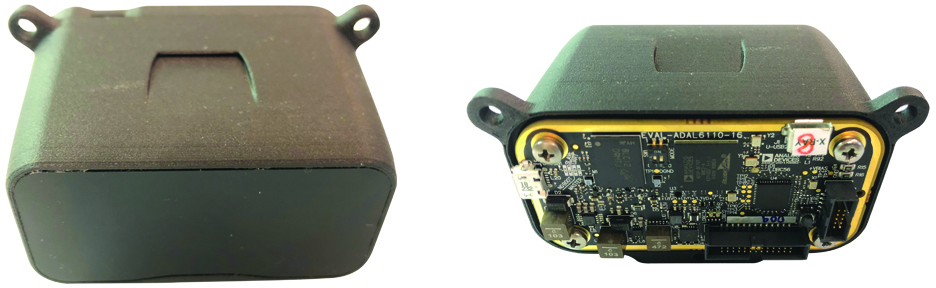
그림 4: 통합 16채널 ADAL6110-16을 기반으로 하는 EVAL-ADAL6110-16 라이다 평가 모듈
이 레퍼런스 디자인에 사용된 광학장치는 37°(방위각) x 5.7°(고도각)의 시야각(FOV)을 달성한다. 방위각으로 선형적인 16개 픽셀 어레이를 사용하며, 20미터에서 픽셀 크기가 0.8미터(방위각) x 2미터(고도각)이므로 평균적인 성인의 체격과 비슷하다. 앞서도 언급했듯이 서로 다른 애플리케이션마다 필요로 하는 광학적 구성이 다르다. 이 레퍼런스 디자인에 탑재되어 있는 광학장치가 애플리케이션 요건에 부적합하면 하우징에서 PCB를 간단히 분리하여 광학장치 구성을 변경할 수 있다.
이 평가 시스템은 ADI의 ADAL6110-16을 기반으로 한다. 이 디바이스는 통합 저전력 16채널 라이다 신호 프로세서(LSP)이다. 이 디바이스는 원하는 시야 방향으로 조명을 비추기 위한 타이밍을 제어하고, 수신된 파형을 샘플링하는 타이밍을 제어하고, 포착한 파형을 디지털화할 수 있다. 또한 ADAL6110-16은 민감한 아날로그 노드들을 통합함으로써 잡음 플로어를 낮춘다. 그러므로 동일한 신호 체인을 디스크리트 부품을 사용해서 구현할 때에 비해 훨씬 더 낮은 신호 리턴들을 포착할 수 있다. 동일한 설계 파라미터로 디스크리트(discrete) 부품을 사용할 때는 rms 잡음이 심할 수 있다. 또한 신호 체인을 통합함으로써 라이다 시스템의 크기, 무게, 전력 소모를 줄일 수 있다.
또한 시스템 소프트웨어를 제공하므로 빠르게 라이다 시스템을 가동하고 측정을 시작할 수 있다. 완벽하게 독립형으로 실행할 수 있으며 USB를 통해서 단일의 5V 전원만을 사용해서 동작한다. 로봇 OS(ROS) 드라이버를 제공하므로 자율 시스템에 손쉽게 통합할 수 있다. 사용자는 자신이 설계하는 로봇이나 자동차로 인터페이스하고 4가지 통신 프로토콜(SPI, USB, CAN, RS-232) 중 하나를 이용해 통신하기 위한 헤더용 커넥터만 개발하면 된다. 또한 이 레퍼런스 디자인은 다양한 수신기 및 이미터 기술에 맞게 손쉽게 수정할 수 있다. EVAL-ADAL6110-16 및 ADAL6110-16 LSP에 관한 추가 정보는 analog.com/LIDAR에서 확인할 수 있다.
그림 5 ~ 7에서 보듯이, EVAL-ADAL6110-16 레퍼런스 디자인의 수신기 기술은 서로 다른 구성에 따라서 수정할 수 있다. EVAL-ADAL6110-16은 Hamamatsu S8558 16소자 포토다이오드 어레이를 탑재하고 있다. 표 1은 거리에 따른 픽셀 크기를 보여주는 것으로서, 20mm 초점 길이 렌즈일 때 유효 픽셀 크기는 0.8mm x 2mm이다. 이 보드의 개별 포토다이오드들을 활성 영역이 각각 0.6mm x 0.6mm인 Osram SFH-2701로 변경한다면, 동일한 거리에서 픽셀 크기가 크게 달라질 것이다. 또한 픽셀 크기에 따라서 FOV 역시 달라질 것이다.
표 1: EVAL-ADAL6110-16에 사용된 수신기 크기 및 광학장치, 수신기를 SFH-2701로 변경했을 때의 픽셀 크기
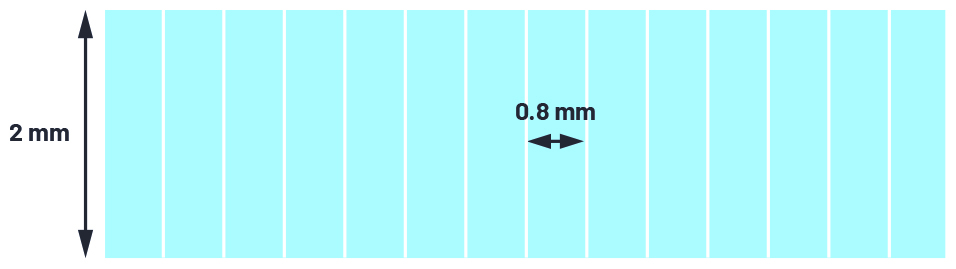
그림 5: Hamamatsu S8558 PIN 포토다이오드 어레이 규격
예를 들어서 S8558을 사용하고, 16 픽셀을 한 라인으로 구성하고, 각 픽셀 크기가 2mm x 0.8mm일 때를 살펴보자.
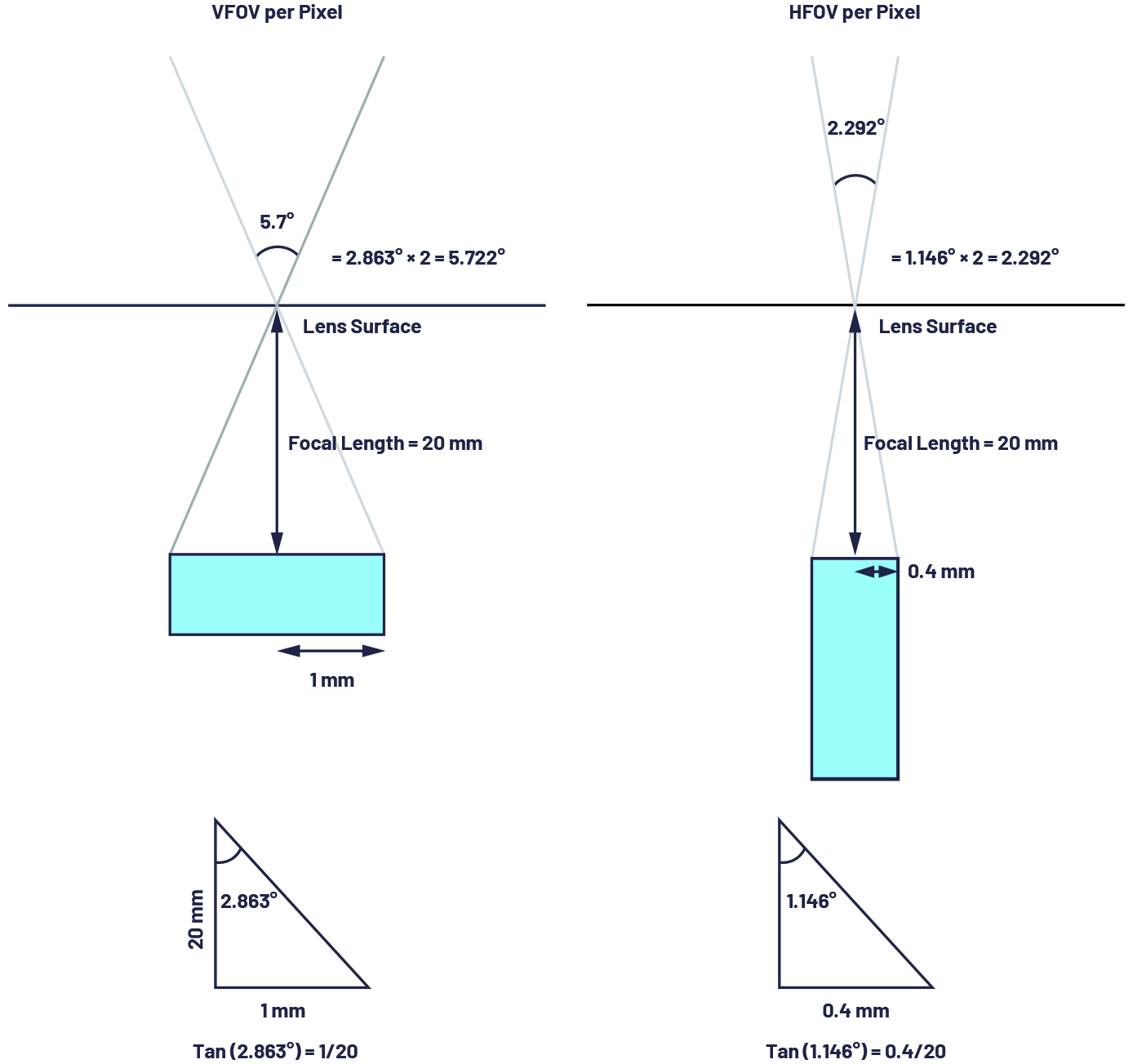
그림 6: 간단한 광학장치를 사용하여 기본적인 각 분해능 계산
20mm 초점 길이 렌즈를 선택했을 때, 그림 6에서 보듯이 기본적인 삼각함수를 사용해서 픽셀당 수직 및 수평 FOV를 계산할 수 있다. 물론 렌즈를 선택할 때에는 수차 보정과 상면 만곡을 비롯해서 더 많은 것들을 고려해야 한다. 하지만 분해능 요구가 높지 않은 시스템이라면 이 같은 간단한 계산으로 충분할 것이다.
1 x 16 픽셀 FOV는 자율 주행차의 물체 감지나 충돌 회피 같은 애플리케이션에 사용하기에 적합하며, 물류 창고 같은 제한적인 공간에서 사용하는 로봇에 SLAM(동시 위치추정 및 지도작성)을 구현할 수 있다.
특수한 애플리케이션이라면 어레이를 4 x 4 격자로 구성해서 주변 물체를 감지할 수도 있다. 버스나 RV 차량용 안전 장치로서, 버스 주변에 사람이 있을 때 운전자에게 경고를 보내는 애플리케이션이 여기에 포함된다. 운전자에게 경고해서 차를 멈추거나 경적을 울리게 함으로써 보행자나 자전거와 충동하는 것을 피할 수 있다.
모든 애플리케이션이 0.1° 각 분해능과 100미터 거리를 필요로 하는 것은 아니다. 해당 애플리케이션이 라이다 시스템이 어떤 것들을 요구하는지 이해하고 물체 크기, 반사도, 물체까지의 거리, 움직이는 속도 같은 것들을 고려해야 한다. 이를 통해 적절한 부품을 선택하고 성능과 비용을 적절히 조화시킨 최적화된 시스템 설계를 달성할 수 있다.
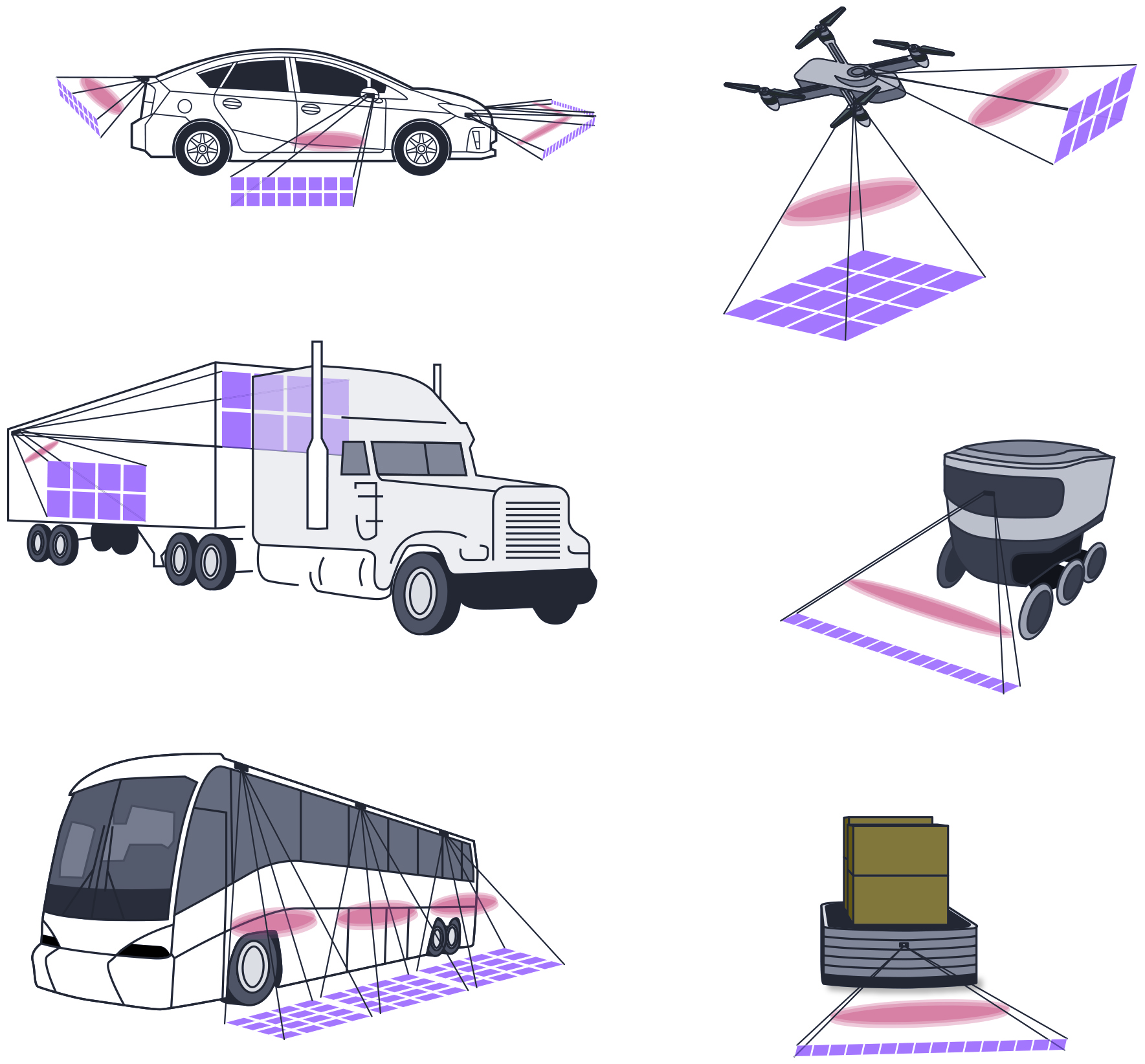
그림 7: 안전성을 향상시키는 다양한 라이다 시스템 구현
론 카푸스타(Ron Kapusta)는 아나로그디바이스의 펠로우이다. MIT에서 공학 학사학위 및 석사학위를 취득했으며, 2002년에 졸업 후 ADI에 입사하여 디지털 이미징 시스템용 데이터 컨버터와 센서 인터페이스 회로 설계 업무를 담당했다. 2014년에 자동차 기술로 전환해서 라이다 센서용 전자장치, 광학장치, 신호 프로세싱 개발을 맡고 있다. 다수의 IEEE 위원회에 참여하고 있다. 문의: ron.kapusta@analog.com
자동차나 로봇 같은 애플리케이션에서 주변 감지 능력이 중요해졌다. 이 때, 물체 감지 또는 물체 분류를 위한 설계 요건들을 이해하면 보다 안전하면서 경제적인 솔루션을 달성할 수 있다.
기계 장비에 완벽한 자율성을 실현하는 것은 더 이상 꿈 같은 이야기가 아니다. 이제 해결해야 할 과제는 자율성 실현을 위해서 어떠한 기술을 어떻게 개발하느냐 하는 것이다. 자율 애플리케이션 구현과 관련하여 가장 많이 거론되는 기술이 라이다(LIDAR: light detection and ranging)이다. 자율 주행용으로는 거리가 100미터 이상이고 각 분해능이 0.1°까지 이르는 라이다 시스템이 주로 사용된다. 하지만 모든 자율 애플리케이션에 이 같은 수준의 성능이 필요한 것은 아니다. 예컨대 주차 보조나 거리 청소 같은 애플리케이션이 그렇다. 이러한 애플리케이션에는 레이다, 스테레오 비전, 초음파, 라이다 같은 다양한 깊이(Depth) 센싱 기술을 사용할 수 있다. 이들 각각의 센서는 성능, 폼 팩터 (Form factor), 비용 면에서 다 다르다. 초음파 장비는 가장 경제적이지만 거리, 분해능, 신뢰성이 조금 떨어진다. 레이다는 거리와 신뢰성 면에서는 매우 우수한데, 각 분해능이 제한적이다. 스테레오 비전(Stereo Vision)은 처리 부담이 크고 적절히 캘리브레이션(Calibration)을 하지 않았을 경우에 정확도가 떨어질 수 있다. 라이다 시스템을 신중하게 설계하면 이러한 한계점들을 극복하고 긴 거리에 대해서도 정밀한 깊이 센싱과 세밀한 각 분해능을 달성하고 복잡성을 낮출 수 있다. 라이다 시스템의 단점은 부피가 크고 비용이 많이 든다는 것인데, 이제는 더 이상 그러한 고민을 할 필요가 없다.라이다 시스템을 설계할 때에는 해당 시스템으로 얼마나 작은 물체를 감지하고자 하는지, 물체의 반사도는 어느 정도인지, 물체들이 얼마나 멀리 떨어져 있는지 판단해야 한다. 여기에 따라서 시스템의 각 분해능을 결정할 수 있고, 이로부터 달성 가능한 최소 신호대 잡음비(SNR)를 계산할 수 있다. 이것이 물체를 감지하기 위한 탐지 능력을 좌우한다.
감지해야 할 주변 환경을 이해하고 절충적인 설계 요구사항들을 잘 조화시킴으로써 비용과 성능 면에서 최적화된 솔루션을 달성할 수 있다. 예를 들어 도로 상에서 시속 100킬로미터로 주행하는 자율 주행차와 창고에서 사람들과 함께 섞여서 시속 6킬로미터로 움직이는 자율 로봇을 비교해 보자. 자율 주행차의 경우에는 차가 시속 100킬로미터로 움직인다는 점 외에, 반대 방향으로 다른 차들 역시 동일한 속도로 주행하고 있다는 점을 고려해야 한다. 주변 감지 차원에서 보면, 이것은 어떤 물체가 시속 200킬로미터의 상대 속도로 접근하고 있다는 것을 뜻한다. 만약 최대 200미터 거리에서 물체를 감지하는 라이다 센서라고 하면, 단 1초만에 차 간 간격이 25% 가까워지는 것이다. 자동차의 속도(혹은 어떤 물체로의 비선형적 접근 속도), 제동 거리, 회피 동작의 역학이 상황마다 다 다를 수 있다. 대체로 고속 애플리케이션에는 원거리 라이다 시스템이 필요하다.
라이다 시스템의 또 다른 중요한 설계 고려사항은 분해능이다. 각 분해능(angular resolution)이 세밀하면 라이다 시스템이 단일 물체에 대해서 다중의 픽셀로 리턴 신호를 수신할 수 있다. 그림 1에서 보듯이, 각 분해능이 1°면 200미터 거리에서 픽셀의 한 면이 3.5미터에 이른다. 픽셀이 이 크기이면 감지하고자 하는 많은 물체들보다 더 크므로 몇 가지 복잡한 과제들이 생긴다. 우선, 흔히 공간적 애버리징을 사용해서 SNR과 감지 능력을 향상시킬 수 있는데, 물체 하나당 한 픽셀이면 이렇게 하기가 어려워진다. 또한 물체를 감지한다 하더라도 물체의 크기를 예측할 수 없다. 도로 상의 장애물, 동물, 교통 표지판, 모터사이클 같은 것들은 모두 크기가 3.5미터 이하이다. 이에 비해 각 분해능이 0.1°인 시스템은 픽셀 크기가 10배 더 작으므로 200미터 거리에서 평균적인 폭의 자동차를 대략 5개의 인접한 리턴 신호로 측정할 수 있다. 대부분의 자동차는 높이보다 폭이 더 길다. 그러므로 이 시스템은 자동차와 모터사이클을 구분할 수 있다.
어떤 물체를 안전하게 넘어갈 수 있을지 판단하려면 방위각보다 고도각에서 훨씬 더 세밀한 분해능을 필요로 한다. 예를 들어서 자율 로봇 청소기가 천천히 움직이면서 탁자 다리 같이 좁고 긴 물체를 감지하기 위해서는 설계 요구가 달라져야 한다.
거리, 움직이는 속도, 물체의 특성, 그에 따른 성능 요구를 이해한 다음에는 라이다 시스템 아키텍처를 결정할 수 있다. 스캐닝을 할 것인지 플래시를 사용할 것인지, 혹은 다이렉트 ToF(time of flight)를 사용할 것인지 파형 디지털화를 할 것인지를 비롯해서 많은 선택들을 해야 한다. 아나로그디바이스(Analog Devices)의 포괄적인 고성능 신호 체인 및 전력관리 부품들(그림 2에서 파란색으로 표시)은 다양한 아키텍처로 폼 팩터와 비용을 비롯한 다양한 요구를 충족하는 시스템 설계가 가능하도록 필요한 모든 기능 블록을 제공한다.
그림 1: 32개 수직 채널을 사용하는 라이다 시스템이 1°의 각 분해능으로 주변 환경을 수평으로 스캔
그림 2: 라이다 시스템을 구성하는 부품들
그림 3: 아나로그디바ㅣ스의 AD-FMCLIDAR1-EBZ 라이다 개발 솔루션 시스템 아키텍처
ADI의 AD-FMCLIDAR1-EBZ는 고성능 라이다 프로토타이핑 플랫폼으로서 905nm 펄스형 다이렉트 ToF 라이다 개발 키트이다. 이 시스템을 사용해서 1D 정적 플래시 구성으로 ADAS/AV는 물론이고 로롯, 드론, 농업 및 건설 장비용 프로토타입을 빠르게 개발할 수 있다. 이 레퍼런스 디자인에 사용된 부품들은 원거리 펄스형 라이다 애플리케이션에 적합하도록 선택된 것들이다. 이 시스템은 905nm 레이저 소스를 ADP3634 고속 듀얼 4A MOSFET을 사용해서 구동한다. 퍼스트 센서(First Sensor)의 16채널 APD 어레이를 LT8331 프로그래머블 전원공급장치로 구동해서 APD 전원 전압을 공급한다. 낮은 잡음과 높은 대역폭이 특징인 여러 개의 4채널 LTC6561 TIA와 435mW/채널로 채널당 전력 소모가 극히 낮은 AD9094 1GSPS 8비트 ADC를 사용하고 있다. 대역폭과 샘플링 레이트는 앞으로 계속해서 높여가야 할 것이다. 그럼으로써 전반적으로 더 높은 시스템 프레임 레이트와 향상된 거리 정밀도를 지원할 수 있다. 전력 소모를 최소화하는 것도 중요하다. 발열을 낮추면 열/기계적 설계를 간소화하고 폼 팩터를 줄일 수 있기 때문이다.
거리 혹은 깊이 정밀도는 ADC 샘플 레이트(sample rate)와 연관된다. 거리 정밀도란 시스템이 물체까지의 거리를 정확하게 측정할 수 있는 능력을 일컫는 데, 주차장이나 물류 창고처럼 좁은 영역 안에서 움직이는 경우에 중요하다. 시간에 따른 거리 변화로 속도를 계산할 수도 있는데, 이러한 경우에는 더더욱 우수한 거리 정밀도가 요구된다. 다이렉트 ToF 같이 단순한 임계 알고리즘을 사용하는 경우에는 달성 가능한 거리 정밀도가 1ns 샘플 간격으로 15센티미터, 즉 1GSPS ADC의 성능에 해당한다. 이것은 c(dt/2)로 계산할 수 있다. 여기서 c는 빛의 속도이고 dt는 ADC 샘플 간격이다. ADC를 사용하기 때문에 내삽(interpolation) 같은 좀더 정교한 기법을 사용해서 거리 정밀도를 향상시킬 수 있다. 대략적으로 SNR의 제곱근으로 거리 정밀도를 향상시킬 수 있다. 데이터 처리를 위해서 가장 성능이 우수한 방법은 매칭된 필터를 사용해서 SNR을 극대화하고 그 다음에 내삽을 사용해서 우수한 거리 정밀도를 달성하는 것이다.
라이다 시스템 설계를 돕기 위한 또 다른 툴인 EVAL-ADAL6110-16은 구성 가능성이 뛰어난 평가 시스템이다. 이 시스템은 충돌 회피, 고도 모니터링, 연착륙 같이 실시간 (65Hz) 물체 감지/추적을 필요로 하는 애플리케이션용으로 단순하면서 구성 가능성이 뛰어난 2D 플래시 라이다 깊이 센서를 제공한다.
그림 4: 통합 16채널 ADAL6110-16을 기반으로 하는 EVAL-ADAL6110-16 라이다 평가 모듈
이 레퍼런스 디자인에 사용된 광학장치는 37°(방위각) x 5.7°(고도각)의 시야각(FOV)을 달성한다. 방위각으로 선형적인 16개 픽셀 어레이를 사용하며, 20미터에서 픽셀 크기가 0.8미터(방위각) x 2미터(고도각)이므로 평균적인 성인의 체격과 비슷하다. 앞서도 언급했듯이 서로 다른 애플리케이션마다 필요로 하는 광학적 구성이 다르다. 이 레퍼런스 디자인에 탑재되어 있는 광학장치가 애플리케이션 요건에 부적합하면 하우징에서 PCB를 간단히 분리하여 광학장치 구성을 변경할 수 있다.
이 평가 시스템은 ADI의 ADAL6110-16을 기반으로 한다. 이 디바이스는 통합 저전력 16채널 라이다 신호 프로세서(LSP)이다. 이 디바이스는 원하는 시야 방향으로 조명을 비추기 위한 타이밍을 제어하고, 수신된 파형을 샘플링하는 타이밍을 제어하고, 포착한 파형을 디지털화할 수 있다. 또한 ADAL6110-16은 민감한 아날로그 노드들을 통합함으로써 잡음 플로어를 낮춘다. 그러므로 동일한 신호 체인을 디스크리트 부품을 사용해서 구현할 때에 비해 훨씬 더 낮은 신호 리턴들을 포착할 수 있다. 동일한 설계 파라미터로 디스크리트(discrete) 부품을 사용할 때는 rms 잡음이 심할 수 있다. 또한 신호 체인을 통합함으로써 라이다 시스템의 크기, 무게, 전력 소모를 줄일 수 있다.
또한 시스템 소프트웨어를 제공하므로 빠르게 라이다 시스템을 가동하고 측정을 시작할 수 있다. 완벽하게 독립형으로 실행할 수 있으며 USB를 통해서 단일의 5V 전원만을 사용해서 동작한다. 로봇 OS(ROS) 드라이버를 제공하므로 자율 시스템에 손쉽게 통합할 수 있다. 사용자는 자신이 설계하는 로봇이나 자동차로 인터페이스하고 4가지 통신 프로토콜(SPI, USB, CAN, RS-232) 중 하나를 이용해 통신하기 위한 헤더용 커넥터만 개발하면 된다. 또한 이 레퍼런스 디자인은 다양한 수신기 및 이미터 기술에 맞게 손쉽게 수정할 수 있다. EVAL-ADAL6110-16 및 ADAL6110-16 LSP에 관한 추가 정보는 analog.com/LIDAR에서 확인할 수 있다.
그림 5 ~ 7에서 보듯이, EVAL-ADAL6110-16 레퍼런스 디자인의 수신기 기술은 서로 다른 구성에 따라서 수정할 수 있다. EVAL-ADAL6110-16은 Hamamatsu S8558 16소자 포토다이오드 어레이를 탑재하고 있다. 표 1은 거리에 따른 픽셀 크기를 보여주는 것으로서, 20mm 초점 길이 렌즈일 때 유효 픽셀 크기는 0.8mm x 2mm이다. 이 보드의 개별 포토다이오드들을 활성 영역이 각각 0.6mm x 0.6mm인 Osram SFH-2701로 변경한다면, 동일한 거리에서 픽셀 크기가 크게 달라질 것이다. 또한 픽셀 크기에 따라서 FOV 역시 달라질 것이다.
표 1: EVAL-ADAL6110-16에 사용된 수신기 크기 및 광학장치, 수신기를 SFH-2701로 변경했을 때의 픽셀 크기
| EVAL-ADAL6110-16 레퍼런스 디자인의 거리에 따른 픽셀 크기 | |||||
| 광학적 FOV | 선택 이유 | 20mm | 40mm | 60mm | |
| Hamamatsu S8558을 사용한 EVAL-ADAL6110-16 | 37° × 5.7° |
20미터 거리에서 평균적인 사람 감지 | 0.8 × 2 |
1.6 × 4 |
2.4 × 6 |
| 16 픽셀의 Osram SFH-2701을 사용한 EVAL-ADAL6110-16 | 픽셀 구성에 따라 다름 | 픽셀 크기는 5미터 거리에서 2리터짜리 물병 2개와 같음 | 0.6 × 0.6 |
1.2 × 1.2 |
1.8 × 1.8 |
그림 5: Hamamatsu S8558 PIN 포토다이오드 어레이 규격
예를 들어서 S8558을 사용하고, 16 픽셀을 한 라인으로 구성하고, 각 픽셀 크기가 2mm x 0.8mm일 때를 살펴보자.
그림 6: 간단한 광학장치를 사용하여 기본적인 각 분해능 계산
20mm 초점 길이 렌즈를 선택했을 때, 그림 6에서 보듯이 기본적인 삼각함수를 사용해서 픽셀당 수직 및 수평 FOV를 계산할 수 있다. 물론 렌즈를 선택할 때에는 수차 보정과 상면 만곡을 비롯해서 더 많은 것들을 고려해야 한다. 하지만 분해능 요구가 높지 않은 시스템이라면 이 같은 간단한 계산으로 충분할 것이다.
1 x 16 픽셀 FOV는 자율 주행차의 물체 감지나 충돌 회피 같은 애플리케이션에 사용하기에 적합하며, 물류 창고 같은 제한적인 공간에서 사용하는 로봇에 SLAM(동시 위치추정 및 지도작성)을 구현할 수 있다.
특수한 애플리케이션이라면 어레이를 4 x 4 격자로 구성해서 주변 물체를 감지할 수도 있다. 버스나 RV 차량용 안전 장치로서, 버스 주변에 사람이 있을 때 운전자에게 경고를 보내는 애플리케이션이 여기에 포함된다. 운전자에게 경고해서 차를 멈추거나 경적을 울리게 함으로써 보행자나 자전거와 충동하는 것을 피할 수 있다.
모든 애플리케이션이 0.1° 각 분해능과 100미터 거리를 필요로 하는 것은 아니다. 해당 애플리케이션이 라이다 시스템이 어떤 것들을 요구하는지 이해하고 물체 크기, 반사도, 물체까지의 거리, 움직이는 속도 같은 것들을 고려해야 한다. 이를 통해 적절한 부품을 선택하고 성능과 비용을 적절히 조화시킨 최적화된 시스템 설계를 달성할 수 있다.
그림 7: 안전성을 향상시키는 다양한 라이다 시스템 구현
저자 소개
사르벤 이펙(Sarven Ipek)은 2006년에 ADI에 입사 후 결함 분석, 설계, 특성분석, 제품 엔지니어링, 프로젝트 및 프로그램 관리 등 다양한 직책을 거쳤다. 현재는 아나로그디바이스(매사추세츠주 윌밍턴)의 자율 교통 및 안전성 그룹에서 라이다 부문 마케팅 매니저이다. 노스이스턴 대학에서 전기 컴퓨터 공학 학사학위 및 전기 공학 석사학위(통신 시스템 및 신호 프로세싱 전공)를 취득했다. 문의: sarven.ipek@analog.com론 카푸스타(Ron Kapusta)는 아나로그디바이스의 펠로우이다. MIT에서 공학 학사학위 및 석사학위를 취득했으며, 2002년에 졸업 후 ADI에 입사하여 디지털 이미징 시스템용 데이터 컨버터와 센서 인터페이스 회로 설계 업무를 담당했다. 2014년에 자동차 기술로 전환해서 라이다 센서용 전자장치, 광학장치, 신호 프로세싱 개발을 맡고 있다. 다수의 IEEE 위원회에 참여하고 있다. 문의: ron.kapusta@analog.com
제품스펙