기술기고문
전기차 경고음 시스템
글:
안드레아스 펠코퍼(Andreas Pellkofer) 애플리케이션 엔지니어,
자간나스 로티(Jagannath Rotti) 소프트웨어 리드,
고덕화(Danny Ko) 애플리케이션 엔지니어 / 아나로그디바이스(Analog Devices, Inc.)
안드레아스 펠코퍼(Andreas Pellkofer) 애플리케이션 엔지니어,
자간나스 로티(Jagannath Rotti) 소프트웨어 리드,
고덕화(Danny Ko) 애플리케이션 엔지니어 / 아나로그디바이스(Analog Devices, Inc.)
들어가며
전통적인 내연 기관 자동차는 저속으로 주행할 때에도 엔진 소리를 낸다. 일반적으로 보행자와 다른 교통 이용자들은 시각, 또는 차량이 보이지 않을 때는 타이어 소리와 다른 소음을 청각을 통해 인지함으로써 차량이 가까이 다가오거나 출발하는 것을 인식한다.
전기차(EV)는 엔진 소리가 나지 않는다. 하이브리드 전기차(HEV) 또는 플러그인 하이브리드 전기차(PHEV)는 저속 주행 시 전통적인 내연기관(ICE)이 작동하기 전에는 거의 소리 없이 움직인다. 이러한 차량이 30km/h 미만 속도로 달릴 때는 소리를 듣기 어렵고, 더 높은 속도에서는 타이어 소리만 들린다.
전 세계 관련 기관들은 시각장애인을 비롯해 보행자나 자전거 이용자가 차량이 접속하는 소리를 듣고 어느 방향에서 오는지 알 수 있도록 하기 위해 PHEV 및 HEV가 전기 모드로 운행할 때 차량에서 내는 최소 수준의 소음을 정하는 규정을 마련하고 있다. 미국 고속도로 교통안전국(NHTSA) 웹사이트에서는 이러한 규정의 예를 볼 수 있다.
전기차 경고음 시스템(EVWSS)은 보행자에게 EV, HEV 및 PHEV의 존재를 알릴 수 있도록 설계된 다양한 소리를 생성한다. 이에 따라 자동차 경적과 유사하지만 덜 긴급한 경고음을 운전자가 발생시킬 수는 있지만, 경고음은 저속에서 자동으로 작동되어야 한다. 이러한 소리는 인공음에서부터 엔진 소음과 자갈 위를 달리는 타이어를 흉내 낸 사실적인 소리까지 다양하다.
아나로그디바이스는 EV를 위한 차량 내 엔진음뿐 아니라 외부 엔진음의 첨단 애플리케이션을 위한 두 종류의 솔루션을 제공한다. 아나로그디바이스는 ADSP-BF706에 기반한 솔루션을 개발했다. 엔트리 레벨 시스템용으로는 ADAU1450 시그마DSP(SigmaDSP®)를 기반으로 한 솔루션을 개발했다. 이들 솔루션은 주행 속도에 따라 사운드를 합성하고 주파수, 사운드 볼륨 및 기타 파라미터를 조정할 수 있으며, 오디오 전력 증폭기에 오디오를 전송할 수 있다. 특정 규정 요건에 따라 내연기관 엔진음이나 기타 다른 합성음을 사용하여 경고음을 시뮬레이션 할 수도 있다.
ADI 블랙핀 프로세서 기반 솔루션
ADSP-BF706 블랙핀(Blackfin+®) 프로세서는 오디오 프로세싱과, CAN(control area network) 버스와의 인터페이싱을 위한 단일 칩 솔루션을 제공한다. 또한 아나로그디바이스는 ADSP-BF706에서 실행되는 CAN 소프트웨어 스택을 개발했다. 이에 따라 사용자는 최소의 노력으로 자동차 등급 데모를 제작할 수 있다(Vector® CAN 스택도 사용 가능). 또한 아나로그디바이스는 완전한 하드웨어 및 소프트웨어 레퍼런스 디자인과 파라미터의 실시간 튜닝을 위한 시그마스튜디오(SigmaStudio®) 호환성을 제공한다.
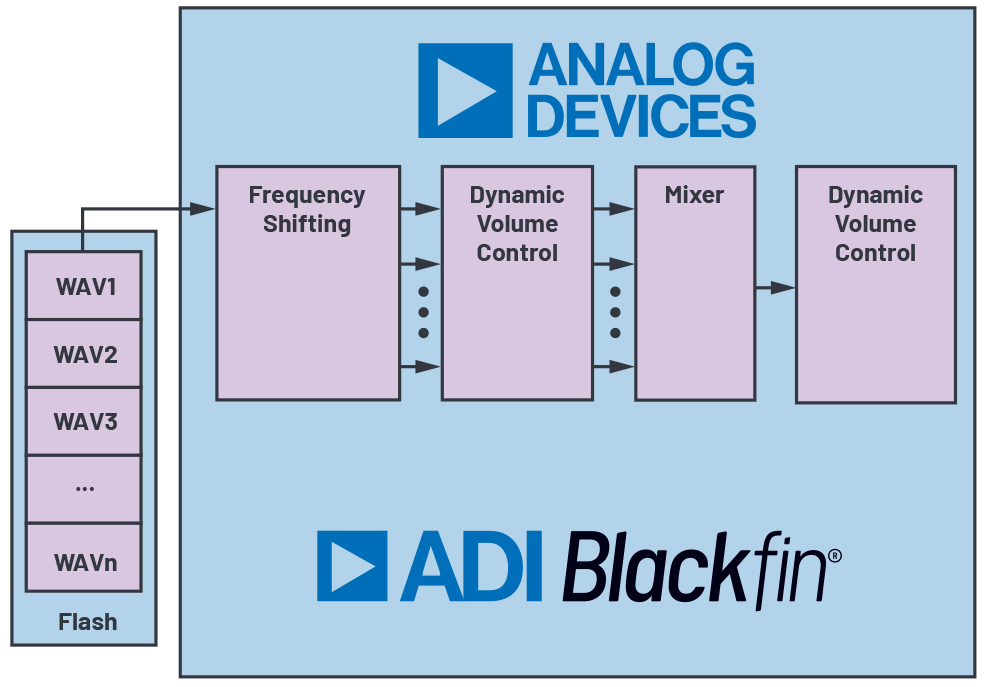
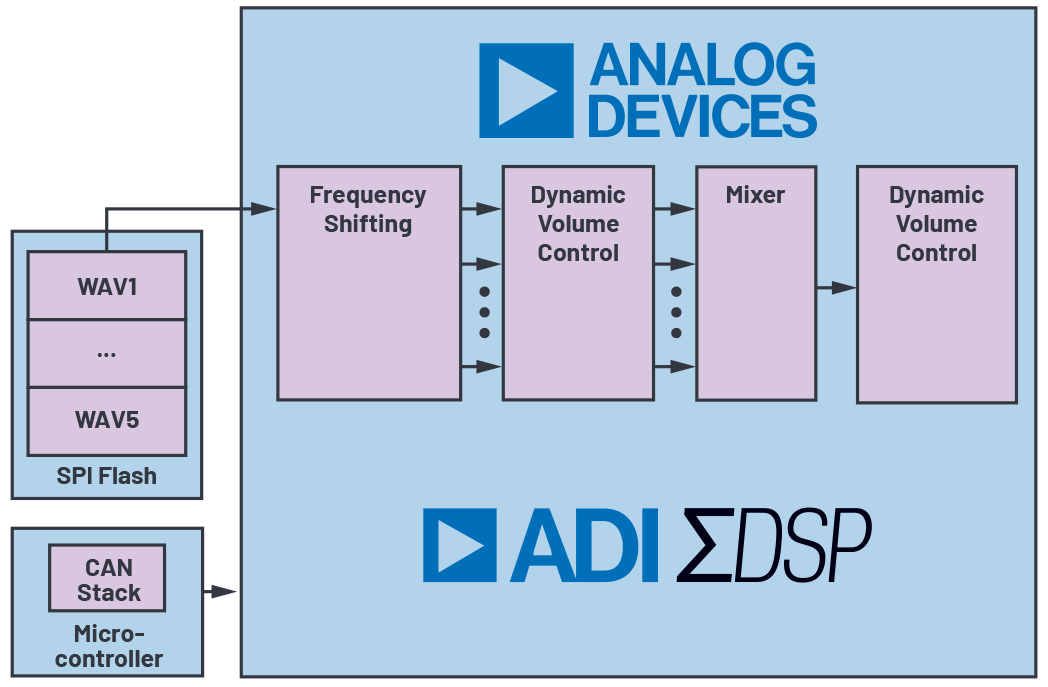
그림 1은 ADSP-BF706 내부의 다양한 프로세싱 블록을 보여준다. 외부의 파형 오디오 파일(WAV)이 시그니처 엔진음 또는 오디오 톤을 저장한다. 외부 SPI 인터페이스를 통해 최대 25개의 WAV 파일에 동시에 접속할 수 있다. 이들 파일은 동적 볼륨 컨트롤을 추가하기 전에 디지털 신호 프로세서(DSP)에서 내부적으로 주파수 이동 및 믹싱된다.
그림 1. Blackfin+ 프로세서의 프로세싱 블록
ADSP-BF706은 외부 메모리에 더 빠르고 간편하게 접속할 수 있도록 메모리 매핑된 SPI 인터페이스를 사용하므로 이들 애플리케이션용으로 외부 DDR(double data rate) 메모리를 사용할 필요가 없다. SPI 플래시 메모리로부터 최대 25개의 WAV 파일에 동시에 접속할 수 있다. 접속 가능한 WAV 파일 수가 많을수록 더 사실적인 엔진음을 생성하기에 유리하다.
ADSP-BF706은 또한 미국 NHTSA의 권고사항인 최대 16배 피치 시프팅을 구현하므로, 차량 속도가 빨라질수록 출력 사운드 주파수를 높일 수 있다. ADSP-BF706은 CAN 버스로부터 차량 속도가 빨라짐에 따라 볼륨을 동적으로 제어할 수 있다.
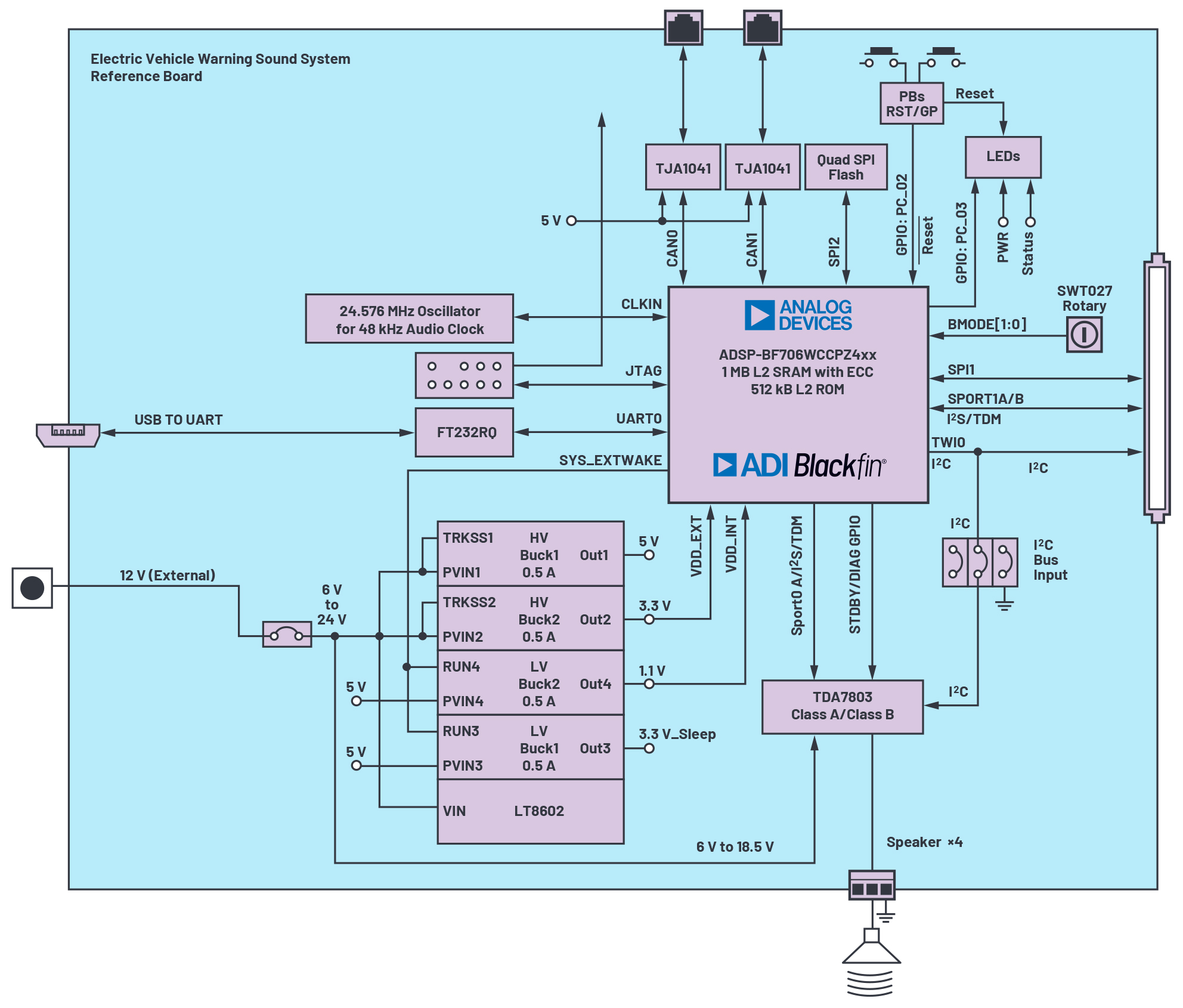
그림 2는 시스템 블록 다이어그램의 세부 내용을 나타낸 것이다. Power by Linear™ LT8602 쿼드 모노리식 동기식, 스텝다운 레귤레이터는 시스템에 필요한 모든 전압 레일을 제공하며, 이는 모두 12V 자동차 배터리 전원에서 가져온다. 이 레귤레이터는 2MHz 스위칭 주파수를 사용하므로 사용자는 AM 대역과 같이 중요하면서 잡음에 민감한 주파수 대역을 피할 수 있다. 또한 LT8602는 입력 전압 범위가 3V ~ 42V이므로, 최소 입력 전압이 3V 정도로 낮은 콜드 크랭크 및 스타트-스톱 시나리오와 40V 이상의 로드 덤프 과도상태에서 전원을 공급해야 하는 자동차 애플리케이션에 이상적이다.
그림 2. 완전한 기능의 보드에 Blackfin+ 프로세서가 탑재된 시스템의 상세 블록 다이어그램
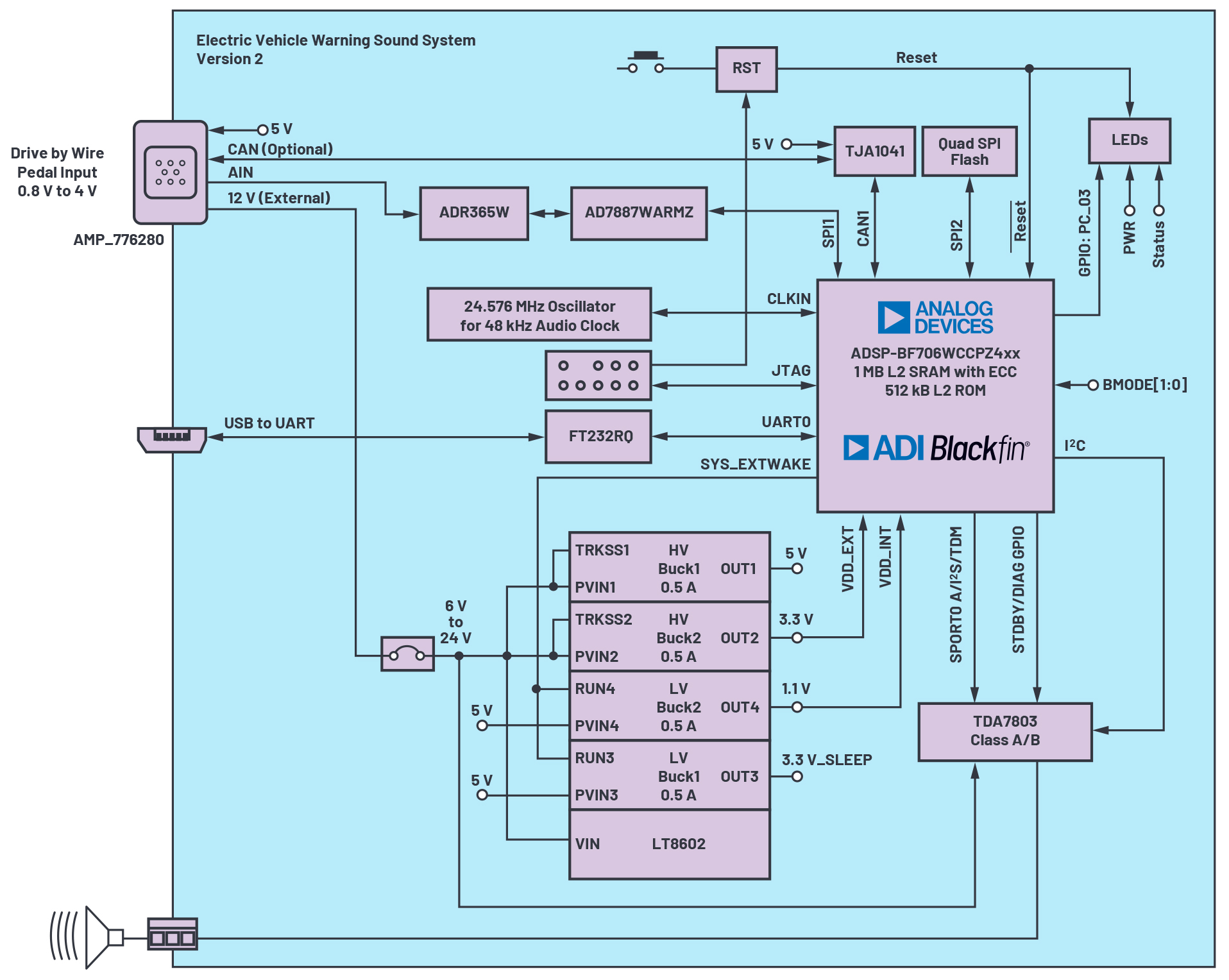
그림 3은 커넥터, 간소화된 주변장치 세트, 그리고 모든 관련 신호를 전달하는 1개의 자동차 등급 커넥터로 구성된 대체 시스템 블록 다이어그램을 보여준다. 이 구성으로는 더 작은 폼팩터 보드 설계가 가능하다.
이 시스템 솔루션은 ADSP-BF706이 마이크로컨트롤러와 오디오 프로세서 역할을 하기 때문에 시스템 BOM 비용이 절감된다.
그림 3. 부품이 간소화된 보드에 Blackfin+ 프로세서가 탑재된 상세한 시스템 블록 다이어그램
이 솔루션에 대한 자세한 설명은 소프트웨어 다운로드 패키지에 제공되는 EVWSS v1 데모 매뉴얼과 EVWSS v2 데모 매뉴얼에서 확인할 수 있다. 이 소프트웨어 패키지(EVWSS-BF_SRC-Rel2.0.0)는 아나로그디바이스 웹 사이트의 소프트웨어 요청 양식 페이지에서 요청하여 받을 수 있다. ADSP-BF706에 대한 자세한 설명은 ADSP-BF70x Blackfin+TM 프로세서 하드웨어 레퍼런스 및 ADSP-BF7xx Blackfin+TM 프로세서 프로그래밍 레퍼런스를 참고하면 된다.
ADSP-BF706 Blackfin+ 프로세서를 위한 EVWSS 소프트웨어 아키텍처
EVWSS 소프트웨어 아키텍처는 ADSP-BF706 하드웨어 아키텍처를 기반으로 한다. 이 프로세서가 이 하드웨어 아키텍처에 의존하고 있는 이유는 메모리 매핑된 SPI 때문이다. CAN 인터페이스는 메모리 매핑된 SPI를 사용하여 플래시 메모리에서 직접 읽는다. 이러한 기능은 EVWSS 라이브러리의 복잡성을 줄여주고 경고음 생성을 위한 메모리 접속이 보다 효율적으로 이루어질 수 있게 한다.
소프트웨어 구성요소
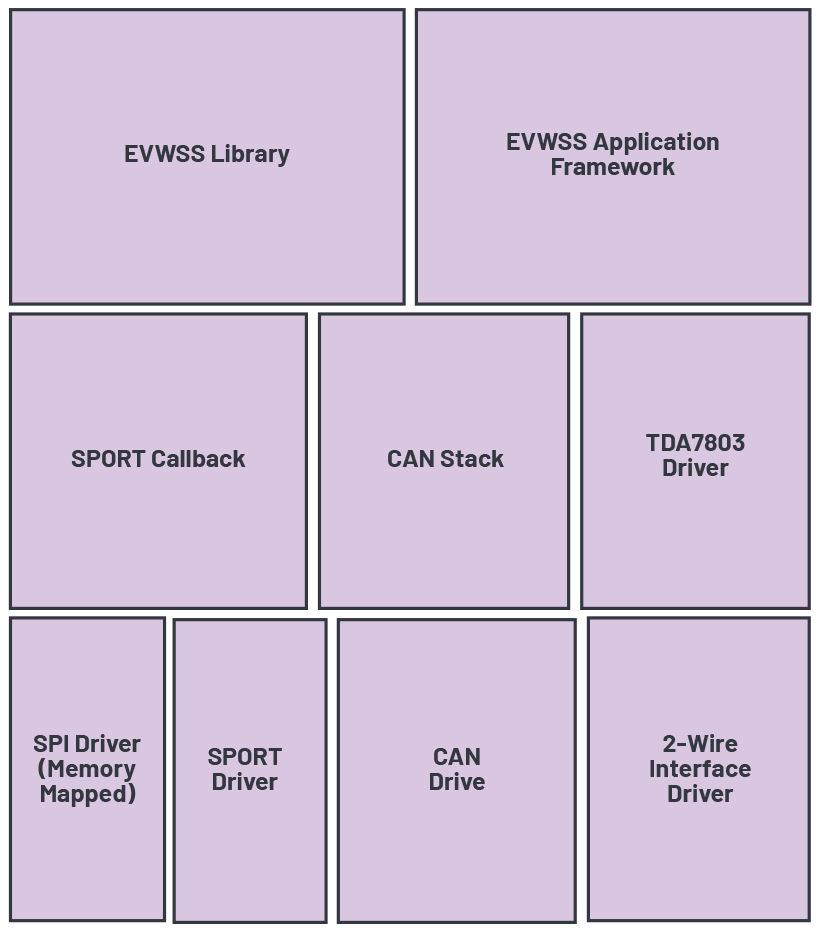
EVWSS 소프트웨어 아키텍처의 구성 요소들은 그림 4와 같다.
소프트웨어 구성요소를 좀더 자세히 살펴보자. SPORT 콜백 기능은 오디오 데이터 샘플 속도에 매핑되고, SPORT 트랜시버 인터럽트 서비스 루틴(ISR) 컨텍스트에서 실행되면서, 플래시 파일(매핑된 SPI 메모리)을 읽고, EVWSS 라이브러리를 사용하여 오디오 조작을 수행하고, 수정한 오디오를 SPORT 트랜시버 인터페이스를 통해 내보낸다. EVWSS 라이브러리는 경고음을 합성하는 다양한 기능을 갖고 있다. 또한 EVWSS 라이브러리는 CAN 스택(또는 디버깅을 위한 UART 인터페이스)으로부터 차량의 속도 입력을 수신한다. TDA7803 드라이버는 외부 전력 증폭기를 제어하여 경고음을 발생시킨다. EVWSS 애플리케이션 프레임워크는 시스템 주변장치, CAN 스택 및 TDA7803 드라이버를 구성한다.
EVWSS 라이브러리 기능
그림 4는 EVWSS 라이브러리의 기능을 나타낸 것으로, 자세한 내용은 소프트웨어 다운로드 패키지에 있는 전기자동차 경고음 시스템 릴리스 노트에서 확인할 수 있다.
그림 4. EVWSS 소프트웨어 아키텍처 블록 다이어그램
피치 제어
피치 시프팅은 제어 입력을 기초로 오디오 신호의 스펙트럼을 이동하는 개념이다. EVWSS 애플리케이션에서 WAV 파일의 베이스 피치는 차량의 속도 입력에 따라 이동된다.
주파수 변조(FM)와 진폭 변조(AM)
엔진음은 흡기, 압축, 동력(팽창), 배기를 포함하는 엔진 스트로크에 의해 결정된다. 이러한 스트로크는 단순한 순수 톤 대신 주파수 변조된 톤을 생성한다. 샘플에서 피치 시프트 파라미터를 변화시켜 주파수 변조를 수행한다.
이 애플리케이션에는 두 종류의 변조(톱니파 및 삼각파)가 포함된다. 톱니파 변조에서 주파수는 최저에서 최고로 상승한 다음 다시 최저로 급속히 하강한다. 삼각파 변조에서 주파수는 최저에서 최고로 상승한 다음 다시 최저로 하강한다.
다양한 오디오 믹싱
오디오 믹싱을 위해 차량 속도와 관련하여 다양한 이득을 구성한다.
WAV 파일 재생
필요한 WAV 파일이 플래시에 있지만, 사용자는 동적 조건에 따라 일부 WAV 파일을 재생 또는 중지할 수 있다.
시그마DSP 기반 솔루션
엔트리 레벨 애플리케이션의 경우 ADAU1450 시그마DSP 프로세서를 ADSP-BF706 프로세서에 대한 대안으로 사용할 수 있다. 평가를 위해 EVAL-ADAU1452 평가 보드를 사용할 수 있다.
그림 5는 시그마DSP 프로세서 내부의 다양한 프로세싱 블록을 보여준다.
그림 5. 시그마DSP 프로세서의 프로세싱 블록
다음과 같은 소프트웨어 요건들이 ADAU1450에서 시그마스튜디오 프로그래밍 환경을 사용하여 지원된다.
▶ 다중 톤 생성
▶ 최대 64 범위의 동적 볼륨 제어
▶ 사운드 믹싱
▶ 리미터
▶ 속도 증가와 함께 오디오 피치를 증가시키는 피치 시프팅
▶ SPI 플래시 메모리로부터 최대 5개 WAV 파일을 동시 재생
아나로그디바이스는 시그마스튜디오(SigmaStudio)에 엔진음 시뮬레이터 모듈을 제공하여 엔진 사운드 튜닝을 간소화하고 필요한 외부, 동시 WAV 파일의 수를 줄여준다. 엔진음 시뮬레이터는 내부적으로 최대 32개 고조파를 발생시킬 수 있다. 이러한 고조파의 차수와 진폭은 그래픽 사용자 인터페이스(GUI)를 통해 프로그래밍할 수 있다.
고조파 발생장치 모듈은 ESS 툴박스의 일부로 사용할 수 있다. 툴박스는 시그마스튜디오 다운로드 페이지에서 직접 다운로드할 수 있다(개정 4.4. 이상). 시그마스튜디오는 CAN 소프트웨어 스택을 지원할 수 없으므로 외부 마이크로프로세서가 필요하다는 점을 염두에 두어야 한다.
시그마스튜디오
시그마스튜디오는 원래 시그마DSP 프로세서 포트폴리오를 위해 설계된 그래픽 프로그래밍 환경이다. 이 소프트웨어는 특별히 자동차 애플리케이션을 위해 개발된 알고리즘 라이브러리를 내장하고 있다. GUI는 튜닝 프로세스를 간소화하고 코드를 작성할 필요 없이 즉시 변경할 수 있는 조절 및 필터 계수를 제공한다. 시그마스튜디오는 아나로그디바이스 웹사이트의 시그마스튜디오 페이지에서 다운로드할 수 있다.
맺음말
아나로그디바이스는 엔트리 레벨 시스템 및 차량 내 엔진음과 외부 엔진음을 지원하는 첨단 엔진음 시스템을 위한 포괄적인 솔루션을 제공한다. 이 글은 사용자를 위한 의사결정 과정을 용이하게 하고 시장 출시 기간을 단축하기 위하여 작성되었다. 아나로그디바이스는 신속한 프로토타이핑 및 제품 개발에 필요한 소프트웨어 구성요소를 포함하여 완벽한 시스템 솔루션을 제공한다.
저자 소개
안드레아스 펠코퍼(Andreas Pellkofer)는 뮌헨 공과대학에서 전자 및 정보 기술을 전공했다. 2006년 아나로그디바이스에 애플리케이션 엔지니어로 입사하여 블랙핀 프로세서 제품군을 맡았다. 이후 주로 DSP 자동차 고객을 담당했다. 2013년에 디지털 비디오 제품 그룹의 시스템 엔지니어로 자리를 옮겨 자동차용 비디오 전송 및 카메라 시스템에 주력했다. 2018년에 이머징 시스템 및 기술 그룹에 합류하여 차량 내 생체 신호 모니터링 및 핸즈온 감지 솔루션을 맡고 있다. 문의: andreas.pellkofer@analog.com
자간나스 로티(Jagannath Rotti)는 인도 뱅갈로르의 PES 공과대학에서 전자 및 통신을 전공했다. 13년 간 자동차 소프트웨어 분야에서 경험을 쌓았다. 아나로그디바이스에 입사하기 전에는 로버스보쉬 및 오토리브에서 각각 파워트레인 및 안전 영역을 담당했다. ADI에서는 자동차 SW 팀 소프트웨어 팀장으로 주로 차량 내 전자장치 전반, 자동차 오디오 버스를 담당하고 있다. 관심 분야는 자동차 네트워크, 네트워크 보안 및 암호화, 오디오 알고리즘, 자율주행, 센서 융합과 산크리트 문학을 포함한다. 문의: jagannath.rotti@analog.com
고덕화(Danny Ko)는 대한민국 서울에서 자동차 시스템 애플리케이션 엔지니어로 오디오 및 이머징 기술을 담당하고 있다. 2004년 ADI에 DSP FAE로 입사하여 3년 동안 삼성, LG 및 광범위한 시장을 지원했으며, 2007년에는 중점 분야를 자동차로 옮겼다. 2010년에 자동차 부서의 자동차 시스템 애플리케이션 엔지니어로 자리를 옮겨 인포테인먼트 영역에서 주로 오디오 애플리케이션을 맡았으며, 2018년 이후 이머징 기술로 업무를 넓히고 있다. 문의: danny.ko@analog.com
제품스펙